‘Past het wel?’ is misschien wel de meest gestelde vraag in bouw- en industrieprojecten. Met clash detection kan deze vraag beantwoord worden. Deze methode maakt botsingen tussen een nieuw object of -ontwerp en een bestaande situatie zichtbaar. Hiervoor hoeft de bestaande situatie niet eens getekend te worden.
Clash detection met een pointcloud is een van onze innovatieve 3D meetoplossingen. Deze pagina geeft informatie over clash detection tussen objecten en pointclouds en biedt oplossingen voor het vraagstuk ‘past het wel’? Daarbij laten we zien dat in veel gevallen niet alles getekend hoeft te worden. We kunnen clashen met een 3D scan of pointcloud. We sporen zowel clashes op van statische situaties als van situaties waarbij onderdelen bewegen. Er zijn bestaat zeer geavanceerde clash detection software, maar ook eenvoudigere methoden kunnen al duidelijkheid geven.
Neem contact op voor de mogelijkheden voor uw project.
Onderwerpen op deze pagina
- Controleren of objecten wel passen in een ruimte
- Controle van 2D tekeningen en 3D modellen
- Toetsen ontwerp tijdens nieuwbouw
- Controle installatieontwerp met een pointcloud
- Visuele clash detection met 3D scanviewer
- Clash detection tijdens de bouw
- Clashen van statische en bewegende objecten
- Geautomatiseerd clashen
Zelf clashen of laten clashen?
PelserHartman deelt veel kennis op deze website. We leggen uit hoe je zelf clash detection kunt uitvoeren. Uiteraard kunnen wij deze service ook voor je uitvoeren. Hiervoor hebben wij speciale methoden en software in huis. Neem contact op met ons kantoor in ‘s-Hertogenbosch wanneer je van onze service gebruik wilt maken.
Clash detection & pointclouds
Naast tekenen en modelleren kun je ook clashen (botsen), simuleren en controleren met een pointcloud. We noemen dit pointcloud clash detection of pointcloud collision detection. Dat kan tijdens een ontwerpproces, maar ook tijdens de uitvoering.
Clash detection kan op hoog niveau gedaan worden met zeer specialistische software. Echter, je kunt ook zelf handmatig een visuele clash detection en -controle uitvoeren. Een aantal reguliere tekenpakketten zoals Autocad, Revit, Archicad en Sketchup en 3D viewers zijn hiervoor te gebruiken. We controleren hiermee gemaakte tekeningen en -modellen, statische objecten én dynamische processen:
- “Is deze tekening van de bestaande situatie correct?”
- “Past het installatieontwerp in de ruimte?”
- “Kunnen deze grote objecten wel veilig naar hun nieuwe plaats gebracht worden via de route die we bedacht hadden?”
Clash detection is een geavanceerde methode die helpt ontwerpfouten in bouw en installaties te voorkomen. We sporen mogelijke knelpunten (clashes) tussen een nieuw ontwerp en bestaande situatie middels een automatisering op. Hierdoor komen ontwerpfouten aan het licht voor start van de bouw. Deze techniek vindt zijn oorsprong in de installatietechniek en is uitermate geschikt voor BIM-renovatie-projecten waarin bestaande bouwkundige vormen gemixt worden met nieuw aan te brengen installaties.
3D solid models voor industrie & installaties
Clash detection is essentieel om fouten in het ontwerp vroegtijdig te signaleren en kostbare aanpassingen te voorkomen. Met onze 3D solid models in DWG, STP of STEP-formaat krijg je een gedetailleerde en nauwkeurige weergave van installaties en technische omgevingen. Deze modellen helpen bij het efficiënt detecteren en analyseren van clashes, zodat je projecten sneller en zonder verrassingen kunt realiseren.

Clash detection gaat om “Past het wel?”
Controle op clashes met pointclouds betekent dat er niet getekend hoeft te worden
Er zijn veel projecten waarbij objecten moeten passen in hun omgeving of waarbij objecten op een veilige manier een route moeten kunnen afleggen tussen bestaande elementen. Hiervoor hebben we een slimme oplossing. We kunnen een pointcloud namelijk integreren met 3D objecten om een proces te simuleren of te controleren. Je ziet zo of objecten passen in hun omgeving of dat er sprake is van botsingen of clashes.
In onderstaand voorbeeld wordt fictief getest of de gemodelleerde hulpconstructie om een bestaande toren past. De toren hoeft niet gemodelleerd te worden.
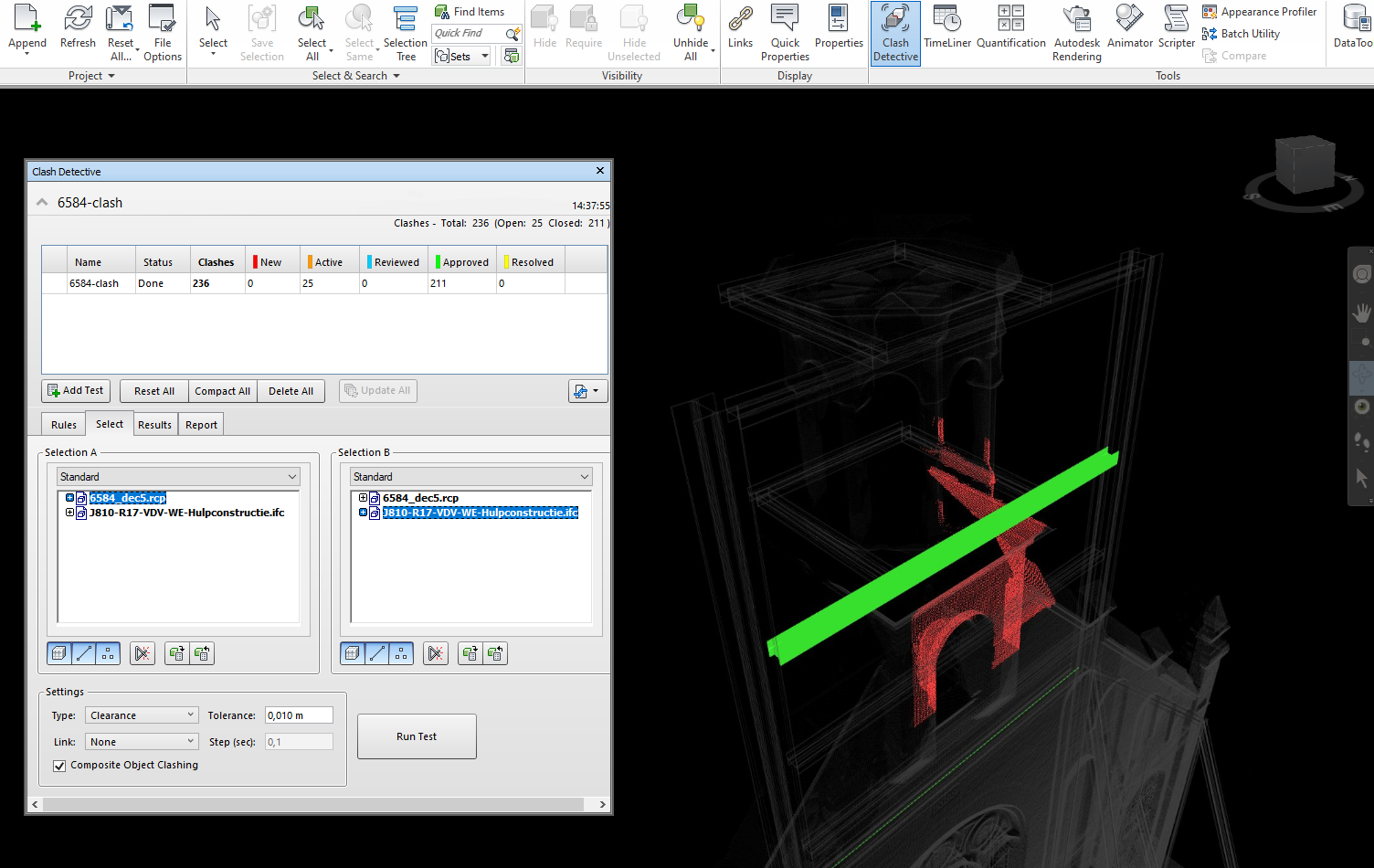
Film clash detection tussen pointclouds en 3D model
De bestaande omgeving en objecten worden compleet 3D ingescand, waardoor er niet getekend hoeft te worden. Waarom zou je immers energie steken in het maken van een 3D model van een pointcloud, als je voldoende hebt aan de geometrie en visuele aspecten van een pointcloud? Wat we tegenwoordig doen is een 3D model van de nieuwe elementen in de pointcloud van de bestaande situatie plaatsen. De onderstaande film laat zien hoe dit in zijn werk gaat.
“Past het wel?” Met een clash detection van 3D solid models op een pointcloud wordt direct duidelijk waar de nieuwe elementen botsen met de bestaande situatie. Hiervoor hoeft de bestaande situatie niet eerst helemaal gemodelleerd te worden.
Clash detection door simulatie van bewegende objecten in as-built situatie
De 3D scanner maakt een pointcloud waardoor geometrie en de belangrijke visuele aspecten zeer accuraat zijn vastgelegd. De zogenaamde as-built is direct beschikbaar. Er zijn steeds betere software oplossingen die ons in staat stellen om bewegende 3D objecten te controleren ten opzichte van reeds aanwezige elementen. Deze aanwezige as-built elementen zijn vastgelegd in de pointcloud.
Onderstaande film laat een aantal toepassingen zien van Clash Detection and Differencing met pointclouds. Je ziet simulaties van bewegende objecten in een ingescande omgeving.
Eenvoudige visuele clashdetection
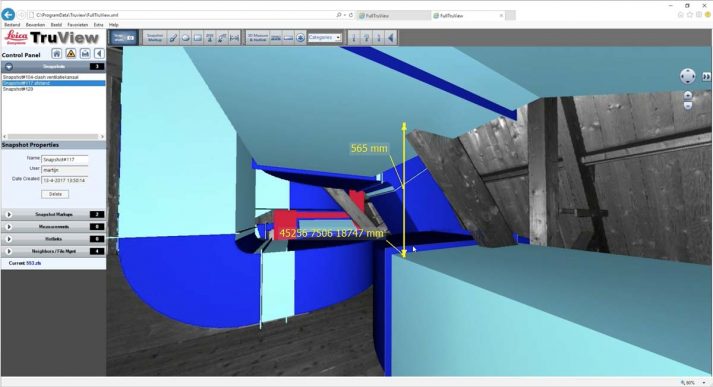
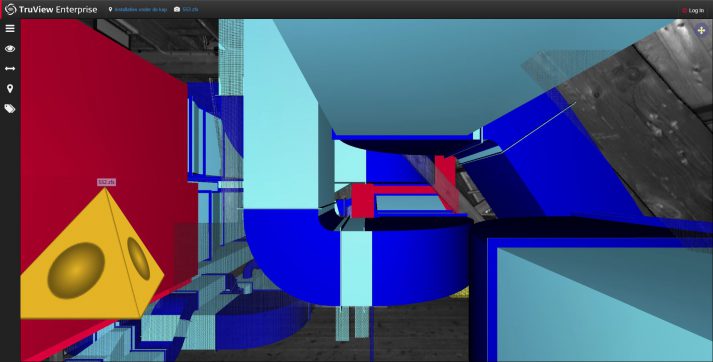
Visuele clash detection met 3D viewer
In de onderstaande online viewer kun je zelf kijken en meten. Dit werkt als een eenvoudige ‘handmatige’ visuele clash detection. Je ziet direct waar de installatie en kapconstructie botsen:
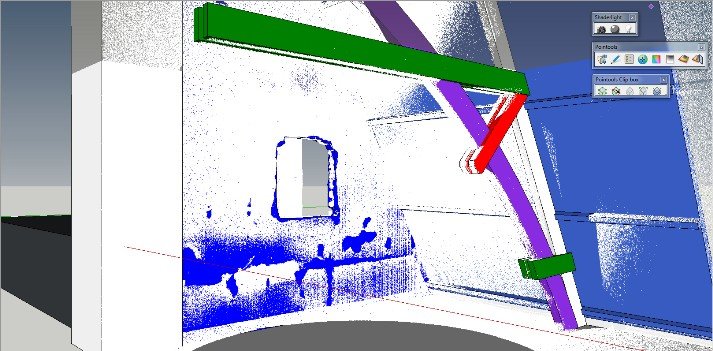
Snelle verschil analyse met hulp van pointcloud
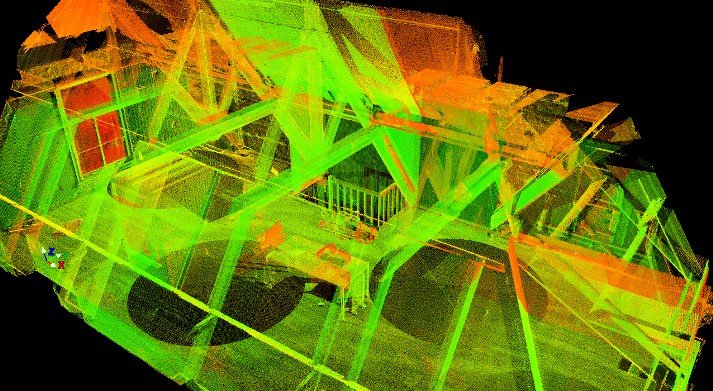
Een 3D scan is een basis die goed gebruikt kan worden in diverse clash detection en simulatie programma’s. Zelfs normale tekenpakketten kunnen met een pointcloud controles op een ontwerp of bestaand 3D model uitvoeren. De afbeelding hieronder geeft een voorbeeld van een proces waarbij we een aangeleverd 3D model controleerden. Het aangeleverde model is weergegeven in de vorm van de blauwe elementen. De zichtbare geel/rood gekleurde wolk van meetpunten is de pointcloud. Zoek de verschillen… Iedereen kan dat; een high-tech tool doet het hooguit wat sneller.

Clash detection tijdens de bouw
Snelle controle tijdens de uitvoering van een bouwproject, ook bij nieuwbouw
Het bovenstaande voorbeeld laten zien hoe aangeleverde 2D tekeningen of 3D modellen gecontroleerd kunnen worden. Uiteraard is het mogelijk om zowel voor als tijdens de bouw snel zaken te kunnen controleren. Een standaardcontrole moet volgens ons deel uitmaken van een bouwproces wanneer risicobeperking belangrijk is. De bouw wijkt immers altijd in meer of mindere mate af van het ontwerp. Door tussentijds op slimme momenten op kritieke plaatsen 3D scans te maken houden we grip de actuele situatie.
Voorbeeld: controle tijdens nieuwbouw
Het betonskelet van een nieuwbouwproject moet hier gezien worden als een bestaand gebouw. We gaan de afwijkingen van dit bestaande gebouw t.o.v. het ideale theoretische ontwerp in beeld brengen. Dat doen we door het bestaande skelet in te scannen en te vergelijken met het 3D ontwerp. Het beton skelet is perfect gemaakt wanneer er sprake is van een 100% clash.
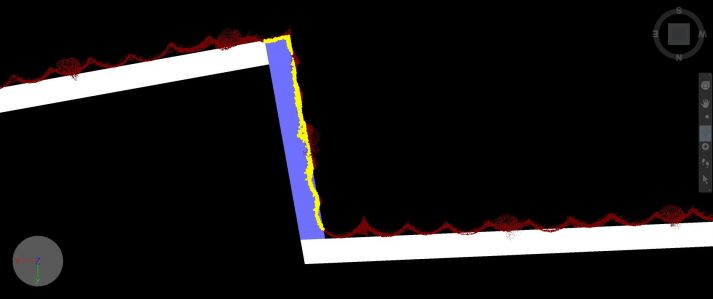
Een ander voorbeeld van controle tijdens nieuwbouw. Voor het maken van een bouwput worden damwanden geplaatst. De aannemer wilde vooraf controleren of de kelder van het nieuwbouwproject nog past binnen de kaders van de damwanden. Met een 3D laserscanner is de bouwput ingescand. De scans en het 3D ontwerp van de kelder zijn geclashed in een clashdetection programma, met onderstaand resultaat. Op diverse punten zijn clashes gevonden. De damwand ‘raakte’ de kelderwand op meerdere posities. Met kleine aanpassingen in het ontwerp zijn voor aanvang van de bouw een heleboel problemen en onvoorziene kosten voorkomen.
Voorbeeld: clash controle van installaties met een pointcloud
Een clash detection kan een nieuw installatieontwerp integreren met een tekening van de bestaande situatie, inclusief installaties. Het is echter ook mogelijk om te clashen zonder eerst de bestaande situatie van gebouw en installaties uit te tekenen. We kunnen de clash detection namelijk uitvoeren op de laserscandata, oftewel op de pointcloud. Deze methode (de bestaande situatie niet tekenen) levert uiteraard sneller een beter resultaat. Tekenen is vaak het duurste stuk van het project. ‘Clashen met pointclouds’ levert ook nog eens een aanzienlijke kostenbesparing op! Lees ook de blogpost: Kappen met kappen tekenen.
Voorbeeld: 3D inmeting onder kap Conservatoriumhotel Amsterdam
Ontwerpfouten voorkomen. Controle ontwerp met 3D scanning tijdens de bouw.
Pelserhartman werd gevraagd om snel een volledige 3D inmeting van de zolder van het Conservatoriumhotel in Amsterdam te doen. Doel was om een goed beeld te krijgen van de beschikbare vrije ruimte onder de kapconstructie. Deze metingen gaven inzicht in wat de mogelijkheden van de ruimte zijn en welke indelingen men kan maken. Het was een controle van het reeds gemaakte ontwerp. Zo wist men zeker dat nieuwe elementen, waaronder installaties, niet zouden clashen met de bestaande houten kapconstructie. Deze controle gaf de architect de zekerheid om de hotelkamers en badkamers onder de complexe kapconstructie correct te kunnen ontwerpen.
Clash detection met Leica CloudWorx
Er zijn meerdere software oplossingen voor het uitvoeren van een clash detection. Wij kozen onder andere voor de software CloudWorx.

Downloads
Zelf testen werkt het beste. Wil je zien hoe jouw software werkt met pointclouds, maar heb je geen pointcloud tot je beschikking? Download dan direct een van onze testsets. Deze standaard testsets zijn geschikt voor 99% van de applicaties in de markt. Zit jouw gewenste formaat er niet bij? Neem dan even contact op. Wij helpen je graag.
Meer informatie?
Ben je geïnteresseerd in de mogelijkheden van clash detection en pointclouds? Partners van PelserHartman krijgen toegang tot alle kennis rondom pointclouds en de verwerking tot waardevolle producten. Lees meer over ons Partnerprogramma. Heb je direct een vraag over clash detections? Neem dan contact met ons op!