In de wereld van 3D-metingen is laserscanning dé manier om gebouwen, installaties en objecten vast te leggen in een ‘pointcloud’. In deze blog belichten we de verschillen tussen statisch vs mobiel 3D laserscannen. Hierbij focussen we op de Leica RTC360 statische laserscanner en de NavVis VLX 3 mobiele laserscanner. Hoewel statische scanners gedetailleerdere gegevens kunnen bieden, zijn mobiele scanners vaak sneller in bepaalde omgevingen. De keuze tussen deze twee hangt af van projecteisen en locatie omstandigheden. Daarnaast varieert de datakwaliteit tussen de twee methoden door factoren zoals het onzekerheidsprincipe. Alle verschillen zijn gebundeld in een handig te downloaden factsheet.
Introductie
Een object kan ingemeten worden met behulp van 3D laserscanners. Het resultaat van deze manier van meten is een digitaal bestand dat we ‘pointcloud’ noemen. Het is letterlijk een wolk van meetpunten. Er zijn verschillende soorten 3D laserscanners, elke met hun eigen voor- en nadelen. Al deze laserscanners maken een pointcloud, maar er zijn wel aanzienlijke verschillen tussen de datasets. In deze blog geven we inzicht in de verschillen tussen pointclouds gemaakt met een statische laserscanner; een scanner die wordt geplaatst op een statief, en een mobiele laserscanner; een scanner waarmee je kan rondlopen, rijden of vliegen tijdens het scannen.
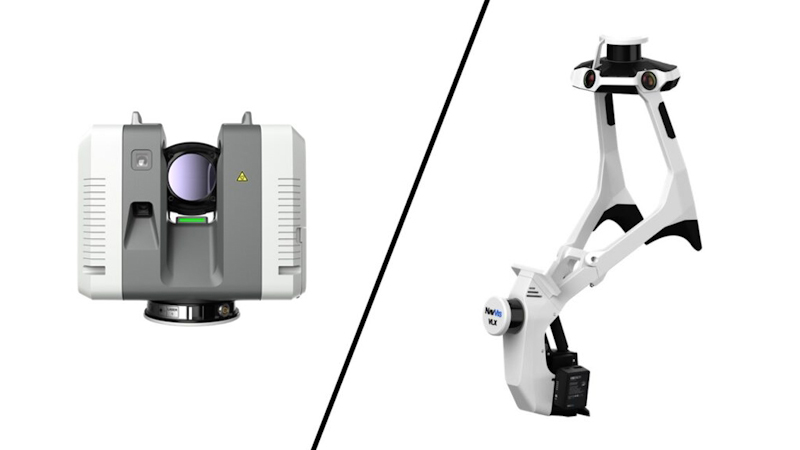
Meer specifiek richten wij ons op de verschillen tussen de Leica RTC360 statische laserscanner en de NavVis VLX 3 mobiele laserscanner. Beide scanners worden door PelserHartman ingezet op projecten. In de meeste gevallen bepalen we zelf welke scanner, of combinatie van scanners het beste past bij het project en bij de te maken eindproducten die gebaseerd worden op de ingewonnen meetdata.
Statisch vs mobiel; de belangrijkste verschillen
Methode van scannen
Het belangrijkste verschil tussen de twee soorten scanners is de methode waarop de scanner bediend wordt.
Scannen met een statische laserscanner
Een statische laserscanner wordt geplaatst op een statief. De scanner maakt vanaf die positie de scan en eventueel een 360-graden kleurenfoto. Vervolgens wordt de scanner opgepakt om enkele meters verderop weer neergezet te worden om de volgende scan te kunnen maken. Het maken van 1 scan duurt gemiddeld tussen de 30 en 180 seconden, afhankelijk van een aantal instellingen en of er wel of geen 360 graden kleurenfoto’s gemaakt moeten worden met de interne camera van de scanner. Afhankelijk van instellingen zoals resolutie en het wel of niet maken van foto’s kunnen er tussen de 50 en 200 scanposities per dag gemaakt worden.

Scannen met een mobiele laserscanner
Een mobiele laserscanner zoals de NavVis VLX werkt totaal anders. De scanner scant terwijl je ermee rondloopt. Dit is ook meteen het belangrijkste aandachtspunt; de route die gescand moet worden moet in één keer zonder te stoppen en zonder hindernissen gelopen kunnen worden. Voorbeeld: tussendoor stoppen om een sleutel te halen van een deur die op slot zit is niet mogelijk.
Om te zorgen dat de volledige scanroute in één keer afgelegd en gescand kan worden, wordt in bijna alle gevallen de route eerst gelopen zonder scanner. Een andere mogelijkheid is dat een 2e persoon dezelfde route ongeveer 10min vooruit loopt zodat hindernissen op tijd kunnen worden opgelost. Tijdens het scannen kan de mobiele scanner ook 360-graden foto’s nemen, dit kost nauwelijks extra tijd. Een scanroute kan maximaal ongeveer 45-60 minuten lang zijn. In die periode kan, afhankelijk van het soort gebouw en de complexiteit van de route tussen de 1.000m2 en 10.000m2 aan oppervlakte gescand worden.
Na 1 scanroute kan eventueel een nieuwe scanroute gestart worden. Dit kan bijvoorbeeld een andere verdieping zijn, of een ander bouwdeel. Gemiddeld is mobiel scannen tussen de 2 en 8 keer zo snel als statisch scannen. Of jouw project ook geschikt is om met een mobiele scanner uit te voeren kan in overleg met PelserHartman vooraf worden bepaald.

Omstandigheden bepalen de methode
De omstandigheden bepalen vaak de scanmethode. Een mobiele scanner kent meer beperkingen dan een statische scanner. Een mobiele scanner kan niet, of veel moeilijker, in kruipruimten scannen of boven systeemplafonds. Ook ruimten waar je met de mobiele scanner moeilijk kan manoeuvreren bijvoorbeeld in drukke installatieruimten zijn minder geschikt. In die gevallen kiezen we ervoor om de ruimte met een statische scanner zoals de Leica RTC360 te scannen.
Buiten scannen lukt niet altijd
Een mobiele scanner zoals de NavVis VLX heeft moeite om buiten een hoge kwaliteit en bruikbare scandata te maken. Dit heeft met de scanmethodiek te maken. Het gaat te ver om dit hier verder toe te lichten. Wil je hoge (>10 meter) gevels meten, of terreinen scannen, dan is het gebruik van een statische scanner bijna altijd een betere keuze.
Statisch vs mobiel datakwaliteit
De wijze waarop er gescand wordt (statisch vs mobiel) heeft ook consequenties voor de datakwaliteit van de meetdataset en de eindproducten die uiteindelijk gemaakt en geleverd kunnen worden. Dit heeft te maken met het natuurkundige verschijnsel ‘het onzekerheidsprincipe’. Dit betekent dat de positie van een object en de tijd waarop je het object meet nooit even nauwkeurig kunnen worden vastgelegd. Het gevolg hiervan is dat wanneer je als waarnemer beweegt de positie van een object nooit zo nauwkeurig bepaald kan worden als in een situatie waarbij je stilstaat. De invloed van dit verschijnsel zie je ook terug in het verschil in datakwaliteit tussen een statische en mobiele scanner. De beste data ontstaat dus wanneer object en scanner beiden stilstaan ten opzichte van elkaar op het moment dat de meting wordt uitgevoerd.
Range-noise of pointcloudsandwich
Elke scanner levert een pointcloud op. Als je deze pointcloud doorsnijdt zie je dat de meetpunten nooit exact op 1 lijn liggen, maar een klein beetje t.o.v. elkaar verspringen. Dit komt voort uit het feit dat ieder meetpunt een afwijking heeft in een andere richting ten opzichte van een ander meetpunt. Dit verschijnsel noemen we range-noise van de pointcloud. Het resultaat is een pointcloudsandwich met een bepaalde plakdikte.

Een statische laserscanner levert een pointcloud met een dunnere sandwich of dunnere plak dan een mobiele laserscanner in dezelfde situatie. Fijne details (bijvoorbeeld bij kozijnen) in het gemeten oppervlak zijn met een statische scanner daardoor veel beter zichtbaar dan wanneer er gemeten in met een mobiele scanner.

Puntnauwkeurigheid
Van een statische laserscanner kan de 3D puntnauwkeurigheid van een meetpunt nauwkeurig bepaald worden. Immers de hoek en afstand waaronder dit punt gemeten is, evenals de specificaties van de scanner zijn goed bekend en zowel scanner als object stonden ten opzichte van elkaar stil tijdens het uitvoeren van de inmeting. Bij een mobiele scanner kan de puntnauwkeurigheid lastiger of helemaal niet berekend worden, ook weer vanwege het onzekerheidsprincipe. De overall nauwkeurigheid van de gehele puntenwolk zal bij mobiel scannen lager zijn dan bij statisch scannen. Wel kan de nauwkeurigheid sterk worden vergroot door aanvullend gebruik te maken van andere meetinstrumenten, zoals de total station waarmee diverse referentiepunten worden ingemeten op basis waarvan de mobiele scandata wordt verwerkt. Deze additionele metingen worden als het ware als kapstok gebruikt waaraan de scandata zoals gemaakt met de mobiele scanner wordt opgehangen. De kapstok noemen we ook wel coördinatenstelsel of grondslag.
Structured of unstructured pointcloud
Een statisch scanner levert een zogenaamde structured of gestructureerde pointcloud. De gestructureerde gegevens bevatten informatie over elke scanpositie als resultaat van het verwerkingsproces van de data (de registratie). Elke scanlocatie is bekend en zichtbaar in de 3D-ruimte. Het is mogelijk om virtueel op elke scanpositie te gaan staan, het ongekleurde of gekleurde panoramische beeld te bekijken, en van scan naar scan te navigeren. In viewers van de pointcloud maar ook bijvoorbeeld in de verschillende CAD pakketten of in Autodesk ReCap zijn de opstelposities van de scanner zichtbaar in de vorm van mirrorbals of bubbleviews.

Een mobiele scanner levert een unstructured of ongestructureerde pointcloud. Omdat een mobiele scanner continu beweegt zijn er geen individuele scanposities zichtbaar in de pointclouddata. Er is geen mogelijkheid om van scan naar scan te navigeren (dit is natuurlijk ook niet van toepassing) en in de verschillende CAD pakketten of in Autodesk ReCap zijn geen mirrorbals of bubbleviews zichtbaar. Wel kunnen de gemaakte 360 graden kleurenfoto’s in een online viewer separaat bekeken worden.
Eindproducten
De wijze waarop er gescand wordt heeft ook consequenties voor het product dat er geleverd wordt. Het belangrijkste verschil is dat een mobiele scanner een unstructured of ongestructureerde pointcloud levert, zonder plaatsinformatie en zonder mirrorbals of bubbleviews van opstelposities. Maar er zijn nog enkele andere verschillen. Zo gedraagt de data uit een scansessie met een mobiele scanner zich in jouw CAD-pakket zoals 1 scanpositie van een statische scanner. Heb je bijvoorbeeld 1 bouwlaag van een gebouw met een mobiele scanner gescand, dan zijn er geen mogelijkheden om in je CAD pakket binnen die bouwlaag scanposities aan- of uit te zetten. Laat je dus vooraf goed door onze experts informeren wat je wel of wat je niet kan doen met de verschillende datasets van mobiele of statische scanners.
Hieronder een kort overzicht van de belangrijkste verschillen en overeenkomsten.
| Pointcloud | Statisch scannen RTC360 | Mobiel scannen VLX3 |
| Bestandsformaat | E57 / RCP / LAS / PTS / PTX / etc. | E57, RCP, LAS, PTS, XYZ, PLY |
| Resolutie pointcloud | Afhankelijk van scannerinstellingen (3-6-12mm@10m) | 5 – 100mm (met tussenstappen van 5mm) |
| Range noise | 0,4mm op 10 meter | 0,5-1,5mm |
| 3D puntnauwkeurigheid | 1,9mm op 10 meter | 5mm per 500m2 |
| Fotokwaliteit | 36 MP 3-camera system | 20 MP 4-camera system |
| Gekleurde pointcloud | Optie | Optie |
| Pointcloud met mirrorballs (gestructureerde pointcloud) | Well mirrorballs (gestructureerde pointcloud) | Geen mirrorballs (ongestructureerde pointcloud) |
| Coördinatenstelsel | RD – NAP of lokaal uitgelijnd | RD – NAP of lokaal uitgelijnd |
| Bestandsgrootte / opdelen | In overleg | In overleg |
| Pointcloudviewer | Statisch scannen RTC360 | Mobiel scannen VLX3 |
| Lokale viewer | Ja – gratis beschikbaar* | Nee, enkel online |
| Online viewer | Ja – tegen hostingskosten | Ja – tegen hostingskosten |
Zelf aan de slag met 3D scanning
PelserHartman 3D measuring – modelling – monitoring, brengt gebouwen, installaties en objecten in kaart. Ons ingenieursbureau is specialist in 3D scannen, 3D modelleren, scan2BIM en monitoring. Daarnaast adviseren wij bedrijven op het gebied van meet- en modelleertechnieken. We geven trainingen, kennissessies en doen pilotprojecten met mensen die meer willen weten. ‘Knowledge to Build on’ is daarbij ons motto. Wil je op de hoogte blijven van al het PelserHartman nieuws? Meld je dan aan voor onze nieuwsbrief.
Wil je starten met modelleren met pointclouds? Of misschien wil je wel zelf gaan scannen?
Doe dan samen met ons een pilotproject. Hierdoor leer je snel alles en maak je een vliegende start.