Voor het in kaart brengen van objecten met 3D laserscanning is het belangrijk om te kiezen voor de juiste laserscanner. Wanneer kies je welke scanner? En wat zijn de voordelen en nadelen van de verschillende laserscanners? In deze blog laten we de verschillen zien tussen een zeer hoogwaardige handscanner en een terrestrial phase laserscanner aan de hand van het project ‘monumentale houten toegangspoort algemene begraafplaats Crooswijk Rotterdam’.

Het monumentale poortgebouw van de Algemene Begraafplaats Crooswijk te Rotterdam met een rijkelijk versierde houten poort.
Stem de scanner af op de juiste klus
Het kleine werk met zeer scherpe details, of het grote werk met de lange afstanden
De gewenste mate van detail en de grootte van het object zijn de belangrijkste factoren om mee te wegen in de beslissing om te scannen met een precisie handscanner of een terrestrial laserscanner. De handscanner wint het op scherpte in detail en dekkingsgraad van een terrestrial scanner. Een 3D mesh model gemaakt met data uit de laatstgenoemde scanner is ‘wolliger’ en heeft veel afgeronde hoeken.
Het scannen van grote vlakken gaat met een terrestrial scanner vele malen sneller dan bij een handscanner. Ook het bereik is veel groter dan bij de handscanner. Wil je een (digitale of geprinte) vergroting maken van relatief kleine objecten (zelfs tot aan auto’s en boten), kies dan voor de precisie handscanner. Wil je grote objecten, zoals gebouwen, in korte tijd in kaart brengen voor teken- en modelleerwerk, maak dan gebruik van terrestrial laserscanners. Om de verschillen tussen de scanners te laten zien, hebben we de monumentale houten poort op de begraafplaats Crooswijk te Rotterdam met beide scanners ingescand en omgezet naar een mesh model.
De verschillende laserscanners samengevat in één vergelijkingstabel
Aan de hand van project ‘Houten poort begraafplaats Crooswijk’.
| Handscanner+lasertracker | Terrestrial 3D laserscanner | |
| Meetmethode | Los in de hand, “vervend” langs het object op 20 cm afstand | Vaste positie, laserscanner op statief |
| Dekking | Hoge dekking | Gemiddeld goede dekking |
| Resolutie (gem.) | Tussen 0,05 mm en 1 mm | Tussen 1 mm en 5 mm |
| Nauwkeurigheid (gem.) | 0,1 mm | Tussen 1 mm en 5 mm |
| Bereik scanner | Klein bereik, overal waar je met de handscanner bij kunt op 20 cm afstand tot het object. | Groot bereik tot wel 180 meter |
| Scantijd | 2 dagen | 30 minuten (met drie posities) |
| Nabewerking op kantoor | Uitlijning, opschoning en dichten van mesh: 8 uur | Registreren, uitlijning, opschoning en meshing: 5 uur |
| Product | Mesh of pointcloud | Pointcloud of mesh |
| Productgrootte | Mesh van 1 poortdeel 1 GB | Mesh 1 poortdeel 160 MB (Onopgeschoonde pointcloud 2,74GB) |
| Kosten (excl. reisuren en km’s) | € 3.000,- | € 600,-* |
* Kosten gebaseerd op drie scans van één poortdeel. Voor een beter dekkende mesh raden wij aan meer vaste scanposities te kiezen.
3D Laserscanning bij restauratie en renovatie van monumenten
Waarom laserscanning bij restauratie?
Stichting Restauratie Werkplaats Schiedam heeft PelserHartman gevraagd de houten poort van het tempelvormig poortgebouw van de algemene begraafplaats Crooswijk in Rotterdam 3D in te meten met high-end laserscan apparatuur. De poort van dit Rijksmonument uit 1832 is bijna volledig uit massief hout opgebouwd en wordt momenteel gerestaureerd. De poort is bijna vijf meter hoog en bestaat uit twee draaiende delen.

Historische foto uit begin 20e eeuw met het monumentale poortgebouw en de houten poort op de achtergrond. (Foto: www.eencrooswijkervertel.nl)
De poort bevat vele kleine details. Het massieve houten toegangshek onder de boogvormige doorgang is gedecoreerd met funeraire symboliek (van boven naar beneden): een uil met aan weerszijden takkenbossen en vleermuizen, gekruiste zeisen en zandlopers met aan weerszijden een adelaars- en een vleermuisvleugel.
Uit onderzoek is naar voren gekomen dat de poort op meerdere plekken last heeft van houtrot. Bij het verwijderen van verf- en reparatielagen voor restauratie bestaat het risico dat een door houtrot aangetast detail verloren gaat. Middels precisiescanning wordt de poort voorafgaand aan de restauratie 3D digitaal vastgelegd. Mocht er een onderdeel van de poort niet te redden zijn. Geen probleem; de exacte vorm is door scanning vastgelegd en kan weer precies nagemaakt worden. Er gaat geen historie verloren dankzij de inzet van laserscanning.

Detail van de zandloper met vleugels
Mesh model uit laserscandata geschikt voor CNC en 3D printing
Om de poort, of delen van de houten poort, exact te kunnen reproduceren is een accuraat 3D model nodig. Vroeger werden onderdelen bij een restauratie helemaal met de hand nagemaakt. Tegenwoordig zijn productietechnieken zover doorontwikkeld dat speciale CNC hout freesmachines exact de gewenste vorm kunnen namaken. De basis hiervoor is een 3D model, bijvoorbeeld in de vorm van een mesh. Een mesh is het best te vertalen als een krimpfolie die over het object wordt gelegd. De vorm van het object wordt precies vastgelegd. Een mesh bestaat uit een groot aantal driehoeken doordat de meetpunten als het ware met elkaar verbonden zijn door lijntjes. Meshing wordt daarom ook wel triangulatie genoemd. Hoe meer kleine driehoeken hoe fijner de mesh. De basis voor een goede mesh is uiteraard goede laserscandata.

Een mesh bestaat uit vele driehoeken. Hier een detail van dichtbij bekeken (gemaakt met laserscan data van de HDS 7000 laserscanner)
Laserscandata perfect voor goede houtrestauratie
Opdrachtgever voor deze meetklus is Stichting Restauratie Werkplaats Schiedam. Zij werken voor culturele instellingen, maar ook voor particuliere monument eigenaren en overheden. Ze zijn gespecialiseerd in houtrenovatie. 3D laserscandata is voor hen de perfecte basis om mee te werken. Restaurateur Domien Akkermans van de Stichting Restauratie Werkplaats Schiedam geeft aan waarom de laserscan data zo waardevol is voor deze restauratie:
“Historische objecten en ingewikkelde vormen zijn moeilijk in traditionele tekeningen vast te leggen. Laserscanning biedt de mogelijkheid om de vorm van deze objecten gedetailleerd in kaart te brengen. Deze digitale gegevens gebruiken we niet alleen tijdens de restauratie werkzaamheden zelf, maar ook tijdens beleidsoverleggen.”
Welke scanner voor welke klus?
Het begint altijd met het maken van de goede uitvraag
Het stellen van de goede uitvraag helpt bij de keuze voor de juiste laserscanner. De juiste laserscanner zorgt voor het beste eindresultaat. Maar wat is de juiste laserscanner? Iedere laserscanner heeft zijn eigen mogelijkheden, maar ook zijn beperkingen. Enkele belangrijke vragen waarop vooraf het antwoord duidelijk moet zijn:
- Wat gaat er gemeten worden?
- Wat is het doel van de meting?
- Wat is het gewenste eindproduct?
- En wat is de gewenste nauwkeurigheid en mate van detail?
Aan de hand van de antwoorden op deze vragen kan een goede indicatie worden gemaakt welke 3D laser scanner het meest geschikt is. Aan de hand van de monumentale poort laten we de mogelijkheden, maar ook beperkingen zien van twee verschillende laserscanners.
(Wil je meer weten over alle aandachtspunten bij de aanvraag van de juiste pointcloud, download hier de handige checklist. Of neem telefonisch contact op met PelserHartman: tel. +31 73-6135729)
Phase scanner VS handscanner-tracker-combinatie
Vergelijking van high-end handscanner met terrestrial 3D laserscanner
Voor het scannen van de houten poort is er gebruik gemaakt van twee systemen. Het eerste systeem is de terrestrial phase laserscanner Leica HDS 7000. Het tweede systeem is een high-end handscanner: Leica Absolute Scanner LAS-20-8 met een Leica Absolute Tracker type AT960-MR. Aan de hand van de case van de monumentale houten poort vergelijken we deze twee high-end systemen. We zullen ingaan op de verschillen in meetmethodes, dekking, resolutie, nauwkeurigheid, bereik, scantijd, nabewerkingstijd. En vertellen over de mogelijkheden van het eindproduct.
Introductie: Leica HDS 7000 3D laserscanner
De Leica HDS 7000 is een ultra-high speed laserscanner die meer dan 1 miljoen punten per seconde kan meten op een afstand van 187 meter (theoretisch). Het betreft hier een long range phase scanner. Voor het meten van objecten kleiner dan 20 meter afstand is de individuele puntnauwkeurigheid beter dan bij een pulse scanner. Deze scanner heeft geen ingebouwde kleurencamera. Hierdoor is het product uit deze laserscanner een ongekleurde pointcloud. Willen we toch gekleurde data met deze scanner maken? Dan scannen we met in combinatie met een externe 360 graden iSTAR camera. Goede high-end terrestrial scanners kosten gemiddeld tussen de € 70.000,- en € 100.000,- excl. btw.

De Leica HDS 7000 laserscanner geplaatst op hoog statief aan de achterzijde van het poortgebouw
Introductie: Leica Absolute Precisie Handscanner met Lasertracker
De Leica Absolute Scanner LAS-20-8 is een precisie handscanner die werkt in combinatie met een coördinaten meetmachine (CMM). Deze Absolute Tracker wordt ook wel een lasertracker genoemd. De Leica Absolute Tracker type AT960-MR zorgt ervoor dat de gemeten data van de handscanner (ongeveer 150.000 punten per seconde) exact wordt gepositioneerd in een coördinatenstelsel. De lasertracker wordt op een vaste positie gezet. Met de handscanner wordt ‘langs het object gegaan’. De lasertracker houdt de positie van de handscanner steeds nauwkeurig in de gaten. Wordt er geen lasertracker bij een handscanner gebruikt, dan is de data veel minder betrouwbaar.
De Leica Absolute handscanner LAS-20-8 met Leica Absolute Tracker type AT960-MR en een laptop om de data live te bekijken
Bij verschillen in kleur en structuur van het te meten materiaal zorgt de automatische aanpassing van de laserintensiteit voor de beste meetdata. De combinatie van een high-end handscanner en lasertracker kost ongeveer € 190.000,- .
Verschillen HDS 7000 & Handscanner+Tracker
1. Verschil meetmethodes en dekking
Met de handscanner volg je als het ware alle vormen van het oppervlak op ongeveer 20 cm afstand. Dit is het beste te vergelijken met het ‘schilderen’ van het object. Het oppervlak wordt als het ware ‘geverfd’ door de handscanner. Het is goed mogelijk om met de handscanner langs moeilijk bereikbare plekken te gaan. De dekking is extreem hoog met deze methode. Ieder hoekje en detail wordt op deze wijze accuraat in kaart gebracht. De aangesloten laptop toont direct live de gescande data. Is er een stukje overgeslagen? Dan is dit meteen te zien en kan het “gat” in de data direct opgevuld worden door met de handscanner het vergeten stukje ‘dicht te schilderen’.

Screenshot van de laptop op locatie waarop in groen live te zien is welk deel met de handscanner gescand wordt.
Ondanks de extreem hoge mate van dekking blijven sommige plaatsen toch lastig te bereiken met de handscanner. Bijvoorbeeld de onderzijde van de poort. Vandaar dat de ’tanden’ onder aan de poort enkele ‘gemiste’ stukken of ‘gaten in de data’ hebben (zie onderstaande afbeelding). Met de grote mate van bewegingsvrijheid van de handscanner wordt dit tot een minimum beperkt. In bijna alle gevallen waar een object goed toegankelijk is, kan een ‘waterdichte’ mesh verkregen worden. Door het lichte gewicht en de flexibiliteit van de handscanner is het mogelijk om vanaf steigers of ladders elementen op hoger gelegen plaatsen accuraat in kaart te brengen. De lasertracker houdt middels sensoren de handscanner in beeld en bepaalt exact de positie van de verkregen data. Handscanners zónder lasertracker-systeem hebben nog wel eens problemen met het plaatsen van de meetdata op de juiste positie. Het gevolg is minder nauwkeurige data met meer verstoring.

De precisie handscanner is erg flexibel en levert data met een hoge mate van detail. Onderaan de poort zijn de lastig bereikbare plekken met gaten in de data te zien. Het blauwe deel is de binnenzijde van de mesh.
Goede scanpositie belangrijk bij terrestrial scanner
De Leica HDS 7000 scanner wordt op een vaste positie geplaatst op een statief. In dit geval een hoog statief. Dit is een in hoogte verstelbaar statief waarmee op een hogere positie gescand kan worden. Een laserscanner scant nergens doorheen. Daarom is het kiezen van een goede scanpositie belangrijk om een goede dekking te krijgen. Scandekking komt door voldoende overlap, niet een betere instelling op de scanner. De scanner draait rond op het statief en brengt alles, in het zicht van het ‘oog’ van de laser, in kaart. Het gezichtsveld van deze scanner is 360° (horizontaal) x 320° (verticaal).
Omdat de scanner op een vaste positie staat is de kans groter dat delen van het te scannen object niet in het zichtveld van de scanner staan. En dus niet gemeten worden. Hierdoor is in basis de scandekking van één enkele scan lager dan bij de handscanner. Met het kiezen van meerdere goede posities wordt de totale scandekking verhoogd.
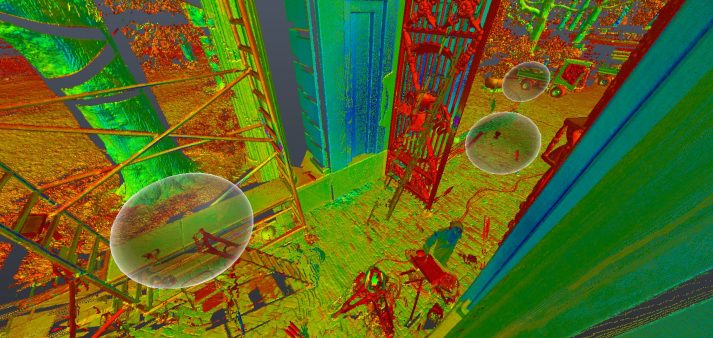
We kijken hier naar de puntenwolk in de pointcloud viewer ReCap. De drie bollen geven de scanposities aan van de HDS 7000 scanner.
Voor deze case zijn drie scanposities met de HDS 7000 gekozen om het linker poortdeel in kaart te brengen (zie bovenstaande afbeelding). Horizontale delen die hoger liggen dan het oog van de scanner worden door de scanner niet gezien. Hetzelfde geldt voor vlakken aan de onderzijde, lager gelegen dan het oog van de scanner. Op onderstaande afbeelding (mesh van de puntenwolk van de HDS 7000) is dit goed te zien. De blauwe kleur is de binnenzijde van de mesh die te zien is omdat er een ‘gat’ in de mesh zit. Dit is ontbrekende data. Voor een betere scandekking zal er dus op meer posities gescand moeten worden. In dit geval op een lagere positie.

Mesh van onderzijde poort gemaakt met data uit de Leica HDS 7000. Er zijn meerdere plekken die de scanner niet heeft kunnen scannen vanuit de gekozen vaste standplaats. De blauwe kleur is de binnenkant van de mesh.
2. Verschil nauwkeurigheid, resolutie en mate van detail
De nauwkeurigheid of maataccuratie zegt iets over hoeveel één laser-meetpunt afwijkt ten opzichte van de werkelijke positie van dat punt. De scanresolutie is, simpel gezegd, de afstand tussen twee punten. Dit laatste bepaalt de mate van detail van de scan en de hoeveelheid informatie in de 3D scan. Deze begrippen nauwkeurigheid en resolutie worden in de praktijk regelmatig door elkaar gehaald.
De handscanner kan meten met een maximale dichtheid van punten (resolutie) van 0,013 mm. De maataccuratie van dit systeem wordt weergegeven in μm. Dit zijn (theoretische) productspecificaties die de fabrikant opgeeft en gelden voor de meest ideale omstandigheden. In de praktijk praten we over een meetonnauwkeurigheid van ongeveer 0,1 mm van de handscanner. Dit geeft de hoge mate van nauwkeurigheid aan van dit systeem. De mate van detail hangt samen met resolutie. Hoe hoger de resolutie. Des te dichter de punten bij elkaar liggen. Hoe meer detail zichtbaar is.
De handscanner levert data met een zeer hoge resolutie. Vergelijk je een mesh, gemaakt met scandata uit een handscanner, met een mesh gemaakt uit scandata van de HDS 7000 scanner dan zie je dat de handscanner details veel scherper weergeeft.
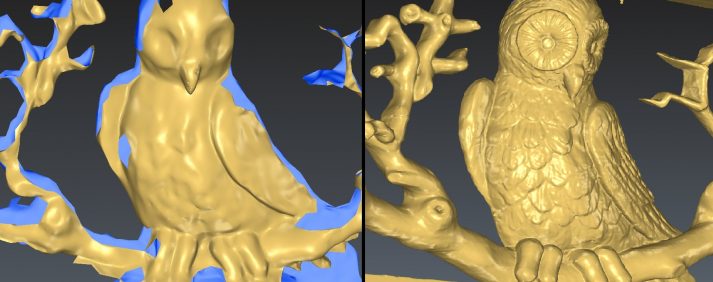
Detail van de uil in de houten poort. Links de mesh met Leica HDS 7000 scanner. Rechts de mesh uit de handscanner met een hogere mate van detail.
Nog steeds hoge resolutie en nauwkeurigheid bij terrestrial scanner
De HDS 7000 laserscanner is geschikt om objecten/gebouwen in kaart te brengen op tientallen meters afstand. Afhankelijk van de afstand tot het object en scaninstellingen is een nauwkeurigheid mogelijk van ongeveer 1 mm. Dit is een theoretische nauwkeurigheid omdat vele factoren hier invloed op hebben. Blijf daarom altijd kritisch als een laserscanbedrijf extreem hoge nauwkeurigheden garandeert.
Een extreem hoge resolutie zorgt voor veel meetpunten, maar geeft ook meer ruis in de dataset. Daarom is meer punten zeker niet altijd beter. Voor deze case is een ‘high-normal-scan-instelling’ gebruikt. Dit komt neer op een resolutie van 6,3 mm op 10 meter. Dichterbij wordt er dus een hogere resolutie behaald (punten staan dichter bij elkaar). En verder weg een lagere resolutie (punten staan verder van elkaar af).

Ingezoomd op een deel van de pointcloud uit de HDS 7000 laserscanner. De losse punten zijn nog waarneembaar, maar vormen visueel al bijna een solid 3D model.
3. Verschil bereik van beide scanners
Met de ‘schilder-methode’ van de handscanner is het directe bereik van de laserscanner beperkt tot 20 cm. Het praktische bereik is natuurlijk veel groter: overal waar je met de handscanner unit bij kan. De handscanner en de lasertracker ‘communiceren’ met elkaar. De lasertracker dient altijd stabiel geplaatst te worden. De afstand tussen de handscanner en lasertracker kan bij het gebruikte type maximaal 20 meter zijn.

Het “schilderen” van de poort met de precisiescanner. Met de handscanner wordt elk detail nauwkeurig in kaart gebracht.
Met de HDS 7000 terrestrial scanner kunnen objecten tot op tientallen meters afstand gescand worden. Hierdoor kunnen complete gevels met slechts enkele scanposities vastgelegd worden. De Leica HDS 7000 phase terrestrial scanner heeft daarmee een groot bereik. Met een pulse terrestrial scanner zoals bijvoorbeeld de Leica P40 3D scanner kan zelfs op nog grotere afstand gescand worden.
De poort is met slechts drie scanposities in beeld gebracht door de HDS 7000. De afstand tot de poortdeur was ongeveer twee meter. Het bereik was, vanwege de geringe afstand tot het te meten object, geen enkel probleem. Bijkomend voordeel van de HDS 7000 scanner is dat meer informatie vergaard wordt dan alleen het geplande doel (de houten poort). Ook de bouw rondom de poort is ingescand. Op onderstaande afbeelding is dit goed te zien. Ook van de wanden en het plafond is nu pointcloud data beschikbaar.

Een schermopname van de geregistreerde pointcloud van de HDS 7000 laserscanner. Er wordt meer informatie dan alleen de houten poort (rood) vergaard. Het lijkt een 3D solid model, maar het zijn losse punten.
4. Verschil scantijd en nabewerkingstijd
De scantijd op locatie is bij de handscanner vele malen groter dan bij de HDS 7000 scanner. Dit komt omdat de handscanner een kleiner bereik heeft. Ieder detail van de houten poort moet immers op 20 cm afstand gescand worden. Het handscannen van de gehele poort kostte ongeveer twee dagen. Om te komen tot het mesh eindproduct moest de ruwe scandata nog opgeschoond en uitgelijnd worden. Enkele kleine gaten in de data moesten gedicht worden. Met dichten wordt bedoeld het digitaal invullen van kleine gaten in de mesh. De totale nabewerkingstijd was acht uur.
Bij de HDS 7000 scanner moet, afhankelijk van resolutie en kwaliteitsinstellingen, gedacht worden aan een scantijd van enkele minuten per scanpositie. Het maken van één enkele scan met een gemiddelde scanresolutie duurt 1 minuut en 40 seconden. Met een extreem hoge resolutie kan een scan wel meer dan 30 minuten duren. Niet altijd is een hoge resolutie instelling noodzakelijk. Een lagere resolutie instelling levert vaak nog steeds prima bruikbare data en is door de beperking in scantijd vele malen goedkoper.
In de nabewerking op kantoor worden losse scanposities aan elkaar gekoppeld tot één pointcloud. Dit wordt registreren genoemd. Indien gewenst kan een pointcloud in een specifiek coördinatenstelsel geplaatst worden. In het voorbeeld van de houten poort was dit niet van toepassing. De pointcloud wordt wel uitgelijnd in een lokaal coördinatenstelsel. Dit houdt in dat er een nulpunt en een richting gekozen wordt voor een lokaal assenstelsel. Ieder punt uit de pointcloud heeft daarmee een x, y en z coördinaat. Vanwege het kleine aantal scans (drie stuks) duurde de registratie nog geen uur. Voorafgaand aan het meshen dient nog een opschoning plaats te vinden van de pointcloud. Het meshen zelf is een aparte stap. De totale nabewerkingstijd was ongeveer vijf uur.
5. Verschil eindproducten, pointcloud of mesh
Zowel bij de handscanner als de terrestrial laserscanner is het product uit de scan een verzameling van meetpunten: de pointcloud of puntenwolk. Het omzetten van punten naar driehoek vlakken wordt meshen of triangulatie genoemd. Dit is een semi-automatische stap. Grotendeels softwarematig wordt de mesh gegenereerd uit de pointclouddata. Voor het instellen van de software en verfijnen van de mesh, en het ‘dichten vat de gaten’ is nog steeds ‘handmatige’ arbeid benodigd.

Ontzettend veel kleine driehoeken zijn te zien wanneer extreem wordt ingezoomd op een detail uit het mesh model van de handscanner
De data van de poort is uiteindelijk bij de klant afgeleverd in een *.STL mesh formaat. De twee deuren van de poort zijn samen ongeveer 2 GB groot. Mesh data kan gebruikt worden voor 3D printing of voor aansturing van CNC machines. Daarom is laserscanning erg interessant voor toepassing binnen restauraties.

Het mesh model van de twee draaiende delen en het bovendeel van de vijf meter hoge houten poort gemaakt met de precisie handscanner
Pointcloud of mesh als eindproduct uit de HDS 7000 scanner
De geregistreerde data uit de HDS 7000 scanner is een ongekleurde pointcloud. Wij maakten een pointcloud in *.RCP formaat (Autodesk ReCap). Dit is een bestandsformaat waarmee met bouwkundige modelleer pakketten zoals AutoCad en Revit gewerkt kan worden. Deze pointcloud heeft onopgeschoond een grootte van ongeveer 2,74 GB. Op onderstaande afbeelding is goed te zien dat de scanner niet alleen informatie van de houten poort heeft gemeten. Ook van het poortgebouw om de poort is data beschikbaar (groen/blauwe kleur). Door de poort heen is zelfs nog informatie te gescand van de auto’s van het groenbedrijf.

Een schermopname van de geregistreerde pointcloud gemaakt met de terrestrial HDS 7000 laserscanner. Er wordt meer informatie dan alleen de houten poort (rood) vergaard.
Zoals hierboven al verder toegelicht, wordt de stap van pointcloud naar driehoekige vlakken meshing genoemd. De mesh van één poortdeel gemaakt uit pointcloud data van de Leica HDS 7000 scanner is ongeveer 160 MB groot. Een stuk kleiner dan bij de precisiescanner vanwege het lagere aantal driehoeken waaruit de mesh opgebouwd is. Duidelijk is op de afbeelding hieronder te zien dat er vanuit de drie scanposities meer data ontbreekt dan bij de precisiescanner. Verder kunnen de details ‘wolliger’ en meer afgerond genoemd worden.

Totaal overzicht van de mesh van linker poortdeel gemaakt met terrestrial laserscanner. De blauwe delen zijn de binnenkanten van de mesh. Daar was niet voldoende dekking.
Downloaden voorbeeld pointclouds
In de bouw wordt vaak een pointcloud als eindproduct geleverd. In de meeste bouwkundige modelleerpakketten is een pointcloud importeerbaar. Op basis van de pointcloud wordt een 2D tekening of 3D model gemaakt. Bekijk zelf de mesh producten van de houten poort op onze downloadpagina. Daarnaast zijn ook enkele andere producten zoals pointcloudviewers en orthofoto’s te downloaden op deze pagina. Om misbruik te voorkomen hebben we deze downloads achter een wachtwoord geplaatst. Vul het aanvraagformulier in op de downloadpagina en u krijgt automatisch via de e-mail een wachtwoord toegezonden waarmee u alle beschikbare downloads kunt testen.
De conclusie
Beide scanners zijn goed in hun eigen vakgebied
Beide scanners zijn high-end in hun eigen marktsegment en leveren ontzettend goede en betrouwbare data. Het vakgebied van de handscanner is meer object gericht. Wilt u een object met hoge nauwkeurigheid en hoge mate van detail inmeten dan is het gebruik van de handscanner aan te bevelen. De handscanner heeft daarnaast een hoge dekking en een klein bereik. Dit laatste zorgt ervoor dat erg grote objecten minder interessant zijn om met een handscanner in te meten. Ook voor reverse engineering en vormcontroles van objecten wordt hoogwaardige data verkregen door high-end handscanning. Houd wel in ogenschouw dat het precies en met een hoge resolutie meten met de handscanner ook erg veel tijd kost.
De terrestrial scanners doen het erg goed bij grote objecten vanwege hun grote bereik en goede scandekking. Denk hierbij aan gebouwen, bruggen en terreinen. Vaak moet een groot oppervlak gescand worden. Iets dat tijdtechnisch met een handscanner niet te doen is. Bovendien is het bij zulke objecten niet noodzakelijk om details kleiner dan 1 mm in kaart te brengen. Met een enkele scan wordt veel informatie verkregen in korte tijd. Daarom is terrestrial laserscanning economisch gezien ook vaak een interessante oplossing.
Toepassingen handscanner
Beelden, mensen, auto’s, treinen, boten, kunstwerken en restauratiedetails
Wij merken dat het binnen onderwerpen zoals hierboven genoemd de mate en scherpte van details erg belangrijk is. De te scannen objecten zijn ‘klein’ te noemen, zeker in vergelijking met een gebouw. Onder andere objecten zoals beelden en ornamenten vallen in deze categorie. Door de beperkte grootte en de vraag om fijne details is de precisie handscanner de aangewezen scanner voor dit type klussen.

3D scan van een bronzen kunstwerk, ingemeten met een zeer nauwkeurige 3D handscanner.
Schaalmodel: vergroten of verkleinen?
We krijgen vaak de vraag om een object 3D in te scannen voor reproductie of om een schaalmodel te maken van het origineel. De data wordt dan door ons geschikt gemaakt voor 3D printing of CNC-frezen. Het gaat vaak om een vergroting of een verkleining van het originele object. Het maken van een vergroting is alleen succesvol indien de scan een zeer hoge mate van detail heeft. Oftewel; we hebben hiervoor een zeer hoge resolutie scan nodig. Ieder detail wordt immers ‘opgeblazen’ waardoor er verlies van detailniveau ontstaat. De kleinste details kunnen gemakkelijk vergroot worden, en er nog steeds fantastisch uit zien, met meetdata uit een precisie handscanner. Een detail dat vastgelegd is in een ‘wollige’ pointcloud zal nog extra ‘wollig’ worden wanneer het object vergroot wordt. De stap van groot naar klein komt echter vaker voor dan andersom waardoor het maken van schaalmodellen van objecten op basis van data uit terrestrial scanners ook vaak goed uitvoerbaar is.
Toepassing terrestrial scanner
Gebouwen, terreinen, bruggen en industrie
Grotere objecten zoals gebouwen, terreinen of bruggen zijn het best in te scannen met een terrestrial scanner. Met hun grote bereik leveren deze scanners data met hoge nauwkeurigheid, maar zijn vele malen sneller dan precisie handscanners. Ook voor gebruik in de industrie- en installatiebouw zijn terrestrial scanners erg geschikt.

De Aalmarkt in Leiden gescand met een terrestrial laserscanner op hoog statief.
Pointclouds voor 2D tekenwerk en 3D modelleren
Pointclouddata moet vaak worden vertaald naar een 2D tekening of 3D model. Het gaat hier niet om minuscule details, maar om een(schematische) weergave van de werkelijkheid. Terrestrial scanners leveren data voor dit modelleerwerk. Let wel: een terrestrial levert nog steeds erg nauwkeurige data met een hoge mate van detail. Deze pointcloud data is geschikt om mee te werken in bouwkundige tekenprogramma’s. Hiermee kunnen snel en accuraat 2D tekeningen of 3D modellen (ook BIM) gemaakt worden. Op onze downloadpagina hebben we diverse voorbeelden van pointclouds en formaten geplaatst die gebruikt kunnen worden om mee te testen. Vul één keer het aanvraagformulier in en u krijgt toegang tot al onze downloads.
Meer informatie over laserscanning
Meer weten over laserscanning? Neem dan contact met ons op door te bellen met ons kantoor op nummer +31 73 613 57 29.