Een laserscanner meet objecten 3D in met veel meetpunten. Dit gebeurt reflectorloos. De laserstralen raken het object en maken zo een netwerk van meetpunten waarin het object gevangen wordt. De laserscanner registreert daarbij heel veel meetpunten in een korte tijd. Die wolk van punten noemen we de puntenwolk of pointcloud. Een pointcloud kan in diverse tekenpakketten gebruikt worden als basis om tekeningen te maken van de bestaande situatie.

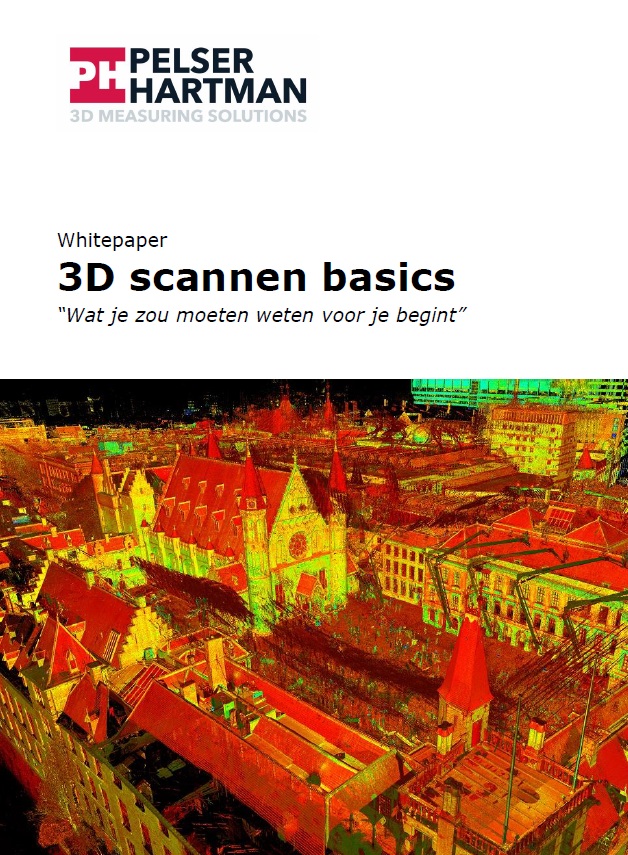
Point cloud van centrum Uithoorn.
Voordelen inmeten met pointcloud/3D scan
Een laserscanner maakt een pointcloud. Het meten met laserscanners en de scandata die hieruit voortkomt, heeft veel voordelen ten opzichte van de data die wordt gemaakt met traditionele meetmethoden. Het grote voordeel ten opzichte van traditioneel inmeten is dat men het totale gebouw kan ‘vangen’ in een 3D puntenwolk en er daardoor een exacte maatvoering beschikbaar is van alles wat de laserscanner heeft gescand. De grootste voordelen van pointclouds zijn:
- De pointcloud vormt direct een 3D model (weliswaar uit meetpunten) dat onmogelijk verkeerd geïnterpreteerd kan worden.
- De laserscanner vergeet niets in te meten. Je hoeft dus nooit meer terug naar de locatie.
- De scanner legt maat en beeld in kleur vast, de pointcloud kan daarmee ook dienen als documentatie en bewijsmateriaal.
- De pointcloud kan de nulmeting zijn.
- Tekenwerk kan eenvoudiger gefaseerd worden wanneer men werkt met een pointcloud. De pointcloud kan namelijk zo worden opgebouwd dat een deel van het tekenwerk achterwege kan blijven.
- De pointcloud kan rechtstreeks als onderlegger gebruikt worden in vele tekenprogramma’s zoals bijvoorbeeld AutoCAD of REVIT voor het opzetten van een 2D of 3D tekening of voor het verder opwerken van tekeningen.
- Het uitbreiden van het pakket tekeningen met bijvoorbeeld extra doorsneden is met een pointcloud heel eenvoudig. Men maakt gewoon een snede op een andere plaats in de pointcloud en hoeft dus niet terug naar de locatie voor extra metingen.
- De pointcloud is de basis voor het maken van viewers waarin je zelf kunt meten. Deze viewers zijn relatief snel en eenvoudig te maken en geschikt voor niet-technische gebruikers (webbased, en zonder tekenprogramma). Deze viewers passen prima in het concept “niet alles hoeft altijd getekend te worden”.
- De pointcloud is de basis voor gevelrestauratieplannen en ortho foto’s.
Point cloud is ruwe meetdata
De puntenwolk uit een laserscanner is ruwe meetdata. Het is een bestand dat vaak enkele Gigabytes groot is. Het bestand kan bijna nooit direct verwerkt worden in een CAD-pakket. We gebruiken speciale software om de meetdata te verwerken (registreren) en geschikt te maken voor gebruik. Er zijn veel verschillende oplossingen en (deel)producten die wij kunnen maken. Het een en ander is afhankelijk van de software waarmee je al werkt. Wij maken graag samen een plan op maat zodat je kunt werken met onze meetdata en 3D producten.

Soorten point clouds
Pointclouds zijn in verschillende soorten formaten te leveren. De meest voorkomende formaten staan hieronder genoemd.
PTS, PTX, PCG, RCS, RCP, E57, PLY, ZFS, IMP, POD, XYZ, TXT, PTG
Point clouds kunnen niet omgezet worden naar DWG of DXF. Theoretisch kan dit wel, maar praktisch niet. De pointcloud bevat al snel te veel punten en dus te veel coördinaten waardoor deze omzetting niet mogelijk is. Dit geldt ook voor een omzetting naar XYZ en TXT, weliswaar in mindere mate. Wij hebben speciale software om de data van de pointcloud om te vormen naar LFM bestanden. Deze kunnen gebruikt worden in diverse programma’s zoals PDMS van Aveva.
Weten welke pointclouds in Autocad of Revit kunnen? Ga naar de pagina Revit en Pointclouds.
Het gebruik van pointclouds
De pointcloud is direct en indirect te gebruiken. De meeste mensen gebruiken de pointcloud indirect en als onderlegger. Ze maken snedes of projecties van de pointcloud om te gebruiken als onderlegger bij het tekenen.
De data van de pointcloud kan ook direct gebruikt worden. Dit doe je wanneer je de exacte werkelijkheid (alle werkelijke vormen) in kaart wil brengen. We maken dan vaak een mesh. De volgende producten kunnen we maken met behulp van een pointcloud (voorbeelden van tekenwerk met de pointcloud zijn hier buiten beschouwing gelaten):
Ortho-photo point cloud

Een mesh op basis van een 3D laserscan.
We maken een platte afdruk die gebruikt wordt om over te trekken. Vaak betreft het hier een jpeg-bestand. Het is een geschikt product voor het maken van geveltekeningen. Maar we kunnen natuurlijk ook prints van doorsneden maken.
Download orthofoto point cloud Watertoren Den Bosch

3D laserscan detail Watertoren.
De afbeelding hiernaast laat een deel van de ortho-photo van de pointcloud zien van de oude Watertoren in Den Bosch. De vele meetpunten zijn te zien in deze afbeelding die eenvoudig overgetrokken kan worden in een tekenprogramma. Het betreft hier wel een redelijk zware jpeg die natuurlijk wel ingeladen moet kunnen worden in het betreffende tekenprogramma. In de meeste gevallen is dit echter geen probleem. Je kunt een deel van de gevel van de watertoren zelf downloaden om te testen in jouw eigen tekenprogramma.
Download hier het jpeg-bestand ortho-photo van de pointcloud.
Mesh uit point cloud
3D laserscan detail kerk.
Een poincloud bestaat uit heel veel puntjes. Als je deze punten verbindt met heel veel korte lijntje ontstaan er vlakken. Als we deze vlakken renderen krijgen we een mesh. Een mesh is dus een model conform de werkelijkheid. Een voorbeeld van een mesh is te zien in de afbeelding hierboven,
Truview uit point cloud
We hoeven niet te tekenen of te modelleren om de opname van de werkelijke situatie te kunnen zien. Met behulp van een speciale opname die we in combinatie uitvoeren met de lasermetingen leggen we de basis voor het maken van een truview. Deze truview is te maken met speciale software. Wij bieden de truview in veel gevallen gratis aan in combinatie met een project waarbij we gebruik maken van de laserscantechniek. Kijk voor meer informatie over de truview op de pagina Leica 3D viewer Truview.

Bovenstaande afbeelding toont een 3D laserscan van een kerk in een Truviewer.