In de vorige blogs hebben we verteld over hoe 3D scanning werkt en wat je er mee kunt. Deze blog helpt je om een goede pointcloud aan te vragen. Om te zorgen dat de geleverde pointcloud van waarde is in het ontwerp- en bouwproces en om teleurstellingen en meerwerk achteraf te voorkomen, blijkt dat een aantal vragen vooraf goed gesteld en beantwoord moet worden.
Deze pagina bevat handvatten en een checklist om de uitvraag rondom de kwaliteit van 3D scannen en de pointcloud scherp te krijgen. Hierdoor ontvang je een goede pointcloud die voldoet aan de door jou gestelde eisen.
Checklist 3D scannen: Hoe vraag ik een goede pointcloud aan?
Het begint met de juiste basiskennis. 3D scanning is een containerbegrip en het is belangrijk te begrijpen wat je precies vraagt, voordat je bestelt. Wij stellen potentiële opdrachtgevers vooraf behoorlijk veel vragen en geven veel informatie, voordat we overgaan tot opdracht. Op deze manier weten we zeker dat de verwachting overeenkomen met wat we gaan leveren.
Lees de volgende blogs uit de serie 3D scannen basics eerst door, om voldoende achtergrondkennis te hebben voor een goede uitvraag:
- Wat is 3D scannen?
- High-end scanning vs. low end scanning
- De meerwaarde van werken met pointclouds
- Wat je moet weten over nauwkeurigheid en resolutie
- Scanner kopen en zelf starten met 3D scanning
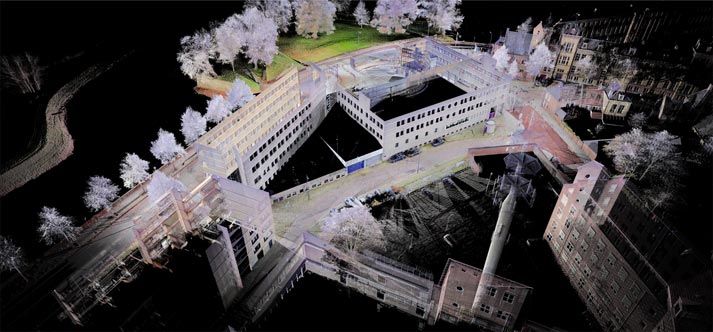
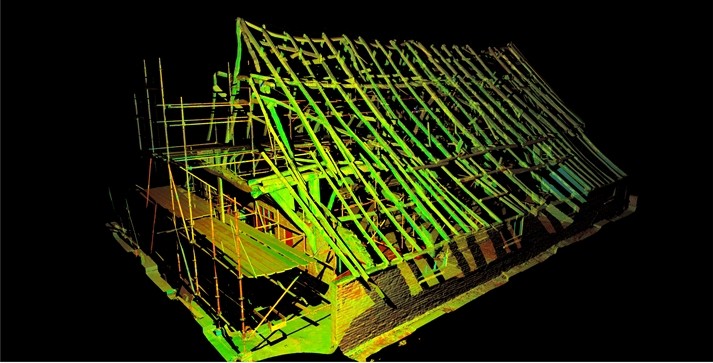
Overzichtsafbeeldingen van pointclouds uit 3D inmetingen met high-end 3D laserscanners.
Checklist 3D scannen
Vragen en aandachtspunten om de juiste 3D scan te krijgen
Zoals gezegd zijn er veel verschillende soorten meetdata en pointclouds te maken. Het is daarom belangrijk om zaken vooraf goed door te spreken. De volgende zaken moeten altijd onderwerp van gesprek zijn.
Stel uzelf de volgende vragen:
- Wat wil ik precies kunnen doen met de scans?
- Welk detailniveau moeten de scans hebben?
- Wat wil ik kunnen zien in de scans?
- Welke resolutie moet de totale 3D scan hebben? (Let op; de resolutie van de individuele scan is vaak niet relevant)
- Wat zou de maataccuratie van de pointcloud moeten zijn? (Wat is de gewenste nauwkeurigheid van de totale scan)
- Wil ik gekleurde scans? (Laserscan in combinatie met foto-opname en colourmapping)
- Wil ik naast de pointcloud ook een viewer van de scans ontvangen?
Stem vervolgens het volgende af met de pointcloudleverancier:
- Geef aan waarvoor je de pointcloud gaat gebruiken. Ga je er bijvoorbeeld 2D tekeningen mee maken of 3D modelleren en op welk niveau (bijvoorbeeld 1:100 D.O. of LOD 200, 300, 400 etc)?
- Wanneer je visualisaties, simulaties of presentaties wilt gaan maken met de pointcloud, geef dit vooraf aan.
- Geef duidelijk aan hoe de situatie op het moment van inmeting zal zijn. Bijvoorbeeld; in gebruik, ontruimd, gestript, bouwval etc.
- Maataccuratie (vraag het scanbedrijf hoe de maataccuratie wordt aangetoond)
- Resolutie
- Scandekkking
- Fotokwaliteit (en bespreek het onderwerp verlichting)
- Opschonen pointcloud (indien van toepassing)
- Opdelen van pointcloud (indien van toepassing)
- Bepaal vooraf het coördinatenstelsel. Dit kan vaak niet eenvoudig kosteloos gewijzigd worden.
- Geef aan wanneer je de pointcloud in het RD-stelsel geplaatst wilt hebben.
- Stel vooraf vast met welk software- of tekenpakket je de pointcloud gaat gebruiken.
- Geef aan wat het soort pointcloudfile zou moeten zijn. Bijvoorbeeld: Archicad heeft E57 bestanden nodig (<4 GB), Revit vraagt om RCP.
Opties voor een waardevolle pointcloud
Dekking van de pointcloud
Naast de mate van detail moet er ook gesproken worden over de dekking van de pointcloud en de hoeveelheid schaduw die is toegestaan. Een scanner scant nergens doorheen en zal dus schaduw veroorzaken. Uiteraard is er eigenlijk geen sprake van ‘schaduw’ maar van ontbrekende data, ook wel ‘gaten in de scan’ genoemd. Een werkelijke 100% dekking van elk detail is meestal niet mogelijk, en vaak ook niet wenselijk. Wat wel mogelijk is, is dat elk onderdeel in de ruimte goed te zien is en goed gemodelleerd kan worden op basis van de gemaakte pointcloud. Dit wordt in de praktijk onder ‘100% full scan’ verstaan. Ook op het vlak van ‘scandekking’ is dus vaak sprake van verwarring. Stem de afgesproken dekking dus goed in detail af.

De ‘schaduw’ achter de boom is een zone zonder meetpunten. Het is een plek zonder scandekking.
Tip: Het helpt hierbij dat de scanoperator niet alleen een meetkundige is in maatvoering, maar ook een goed begrip heeft van wat hij scant en met welk doel. Een bouwkundige levert sneller een beter meetresultaat van een gebouw, omdat hij beter begrijpt wat de architect of aannemer wil zien.
Gekleurde of ongekleurde pointcloud
Een pointcloud bestaat in de basis uit meetpunten. Deze meetpunten kunnen gekleurd worden met fotomateriaal waardoor iedere coördinaat (meetpunt) de juiste kleureigenschap krijgt. Er zijn drie manieren om foto opnamen te maken waarmee pointclouds gekleurd kunnen worden:
- Foto opname met interne camera van scanner
- Foto opname door externe camera bovenop scanner
- Foto opname door separate externe camera die geplaatst wordt op posities die overeenkomen met posities van waaruit de scanner heeft gemeten.
Beslis vooraf of je een gekleurde pointcloud nodig hebt, of nodig zou kunnen hebben. Een foto-opname direct gecombineerd met 3D scanning brengt een aantal grote voordelen met zich mee in vergelijking tot een separate foto-opname die op een later moment wordt gemaakt. De kleuring is accurater en vaak kost het minder tijd en geld om de foto-opname direct gecombineerd uit te voeren. De pointcloud kan achteraf ook eenvoudiger gekleurd worden, wanneer de foto’s direct genomen zijn tijdens het scannen. Dit kan niet wanneer men werkt met een separate opname op afwijkende posities t.o.v. de standplaatsen van de scanner. Ook is het resultaat in dit geval niet zo nauwkeurig, wat vaak een vereiste is van een gekleurde pointcloud.

Een HDR panorama foto gemaakt door een high-end laserscanner. De foto wordt gebruikt om een pointcloud te kleuren.
Een scanner is geen fototoestel
Er zijn veel scanners die ook foto’s kunnen maken met een interne camera. Een scanner maakt zo’n geval meerdere foto’s en de software produceert hiervan een uitgeklapte bolfoto. Een laserscanner is geen fotocamera en niet geschikt om ingezet te worden met het doel ‘het maken van de perfecte panoramafoto’. Daar zijn immers aparte camera’s voor uitgevonden. Deze doen dat specifieke onderdeel sneller en goedkoper.
De nadruk zou moeten liggen op het leveren van de perfecte gekleurde pointcloud. Een heel hoog aantal megapixels van de foto heeft daarbij weinig toegevoegde waarde omdat de gevraagde fotokwaliteit niet meer aansluit op de resolutie van de pointcloud. Men doet er verstandig aan om de fotokwaliteit (die vaak gekozen kan worden) af te stemmen op de scanresolutie in plaats van andersom.
Tip: let op parallax
Als het gaat om de perfecte gekleurde pointcloud dan is het raadzaam eisen stellen aan de interne camera en gebruik van externe camera’s bovenop de scanner te verbieden. Dit soort externe camera oplossingen geven namelijk op korte afstand een parallax probleem (verschil tussen centrumpunt scanning en foto opname) waardoor de kwaliteit van viewers en pointclouds slechter wordt.
De interne camera heeft, bij high-end scanners, hetzelfde centrumpunt als het lasermeetsysteem. Dit betekent dat er geen enkele verschuiving (parallax) probleem ontstaat tussen de gegenereerde bolfoto en de pointcloud. De scanner voert eerst de meting uit en maakt daarna een rondje foto’s. Deze foto’s worden aan elkaar gestitched tot een zeer hoogwaardige HDR bolfoto die geen overgangen tussen de verschillende foto’s laat zien. Het centrumpunt van deze bolfoto komt overeen met het centrumpunt vanwaaruit de scanner de metingen verricht.
Een HDR panorama foto gemaakt door een high-end laserscanner. De foto wordt gebruikt om een pointcloud te kleuren.
Gekleurde pointcloud producten
Pointclouds kunnen dus gekleurd worden met fotomateriaal. Deze gekleurde pointclouds kunnen gebruikt worden voor het maken van 2D tekeningen en 3D modellen. Daarnaast vormen ze de basis voor het maken van een aantal verschillende producten zoals bijvoorbeeld:
- Orthofoto’s van bijvoorbeeld gevelaanzichten. Dit kan een deel van het tekenwerk vervangen of aanvullen met detailinformatie
- 3D visualisaties en simulaties
- 3D viewers
- Fly-through films
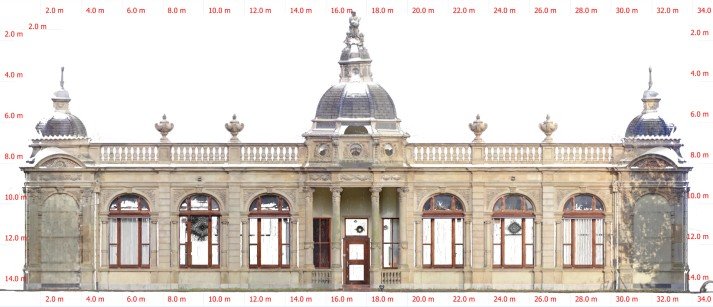
De afbeelding laat een orthofoto van een pointcloud zien.
Bovenstaande producten vereisen hoogwaardige fotografie. Ze kunnen niet gemaakt worden – of alleen met een slechte kwaliteit als gevolg – wanneer men de foto-opname niet direct uitvoert in combinatie met de scanning. Achteraf is dit niet op een goede manier te ‘repareren’. Oftewel, achteraf is het lastig – en soms onmogelijk – om alsnog een goede foto opname te maken die geschikt is voor het kleuren van de pointcloud.
Bij voorkeur worden de foto’s voor deze producten gemaakt met een interne HDR-camera. HDR staat voor High Dynamic Range. Het maakt een aantal foto’s met verschillende belichtingstijden en combineert de beste onderdelen in 1 foto. Het voorkomt overbelichting en onderbelichting van belangrijke details en geeft zo een realistischer eindresultaat.

De afbeelding laat een gekleurde pointcloud zien.
Waarom een gekleurde pointcloud?
Laat niet zonder duidelijke reden een gekleurde pointcloud maken. Het scannen in combinatie met het maken van foto’s is een flink stuk duurder, omdat het langer duurt en omdat de scanning uitgevoerd moet worden met duurdere high-end scanners. Ook de dataverwerking op kantoor neemt meer tijd in beslag. Bijvoorbeeld: de scanners van Z+F hebben 4,5 minuten extra nodig voor het maken van een foto opname bij normaal kunstlicht. De Leica P40 heeft zelfs iets meer dan 12 minuten extra nodig voor het maken van een foto opname met een gemiddelde kwaliteit. Dat komt dan neer op een verdubbeling van de meettijd, en dus de kosten.
Opschonen van de pointcloud
Een laserscanner meet alle zaken die zichtbaar waren vanaf de plek waar hij stond (gebouw, straten, bomen, vogels, mensen, fietsen, auto’s etc). Het is niet altijd wenselijk om alle informatie in het tekenpakket te zien. De pointcloud kan in meer of mindere mate opgeschoond worden waardoor een groot deel van de irrelevante zaken verwijderd worden. Het opschonen van een pointcloud is in veel gevallen niet nodig en een tijdrovende bezigheid en daardoor kostenverhogend. Daarbij is het opschonen soms zelf sterk af te raden omdat het opgeschoonde resultaat kan zorgen voor een foute interpretatie van delen van de scandata. Dit kan fouten in tekeningen en modellen tot gevolg hebben.
Een pointcloud opschonen is niet altijd nodig – en soms is het gevaarlijk. Het verwijderen van een grote rechthoekige tafel bijvoorbeeld, zorgt voor een gat in de scan van het vloerdeel onder de tafel. Het kan zijn dat de tekenaar dit interpreteert als een vide.
Vraag naar specificaties, kalibraties en bewijsmateriaal
Om er achter te komen of de gewenste maataccuratie gehaald gaat worden, kun je vooraf best veel doen. Vraag altijd naar de hoek- en afstand nauwkeurigheid van het apparaat en natuurlijk het kalibratierapport (scanners moeten ieder jaar gekalibreerd worden). Dit geeft houvast over de kwaliteit van de scanapparatuur en de professionaliteit van het scanbedrijf.
Om te beginnen raden we aan om het scanbedrijf altijd om een bewijs te vragen waaruit de geleverde maataccuratie kan worden opgemaakt. Denk bijvoorbeeld aan het registratierapport van de pointcloud i.c.m. het vereffeningsrapport van de data die gemaakt is met de total station, indien van toepassing.
Vraag de scanpartij hoe ze de gevraagde maataccuratie gaan halen. Laat ook de maatvoerder tijdens het scannen en inmeten meetpunten achterlaten in het werk. Dit maakt eventuele controle van de maataccuratie achteraf eenvoudiger.
Checklist 3D scannen: goede voorbereiding is het halve werk
Lees de volgende pagina’s als je zelf wil starten met het werken met 3D scans:
- Starten met pointclouds – Deel 1: Hardware en software
- Starten met pointclouds – Deel 2: Laserscandata
- Wordt lid van onze nieuwsbrief en krijg automatisch tips en trucs! (zie onderaan deze pagina).
Je zult merken dat het werken met de juiste pointcloud veel voordelen oplevert. 2D tekenen en 3D modelleren gaat eenvoudig en snel en automatiseringen zullen goed werken. 3D viewers en visualisaties zien er goed uit en geven veel inzicht.
Meer leren? Lees de hele blogserie
In de blogserie 3D scannen: de basics hebben we de informatie gedeeld waarvan wij vinden dat je die moet hebben om een goede start te maken met het gebruik van 3D scans in je workflow. Dit is de informatie die wij delen met nieuwe opdrachtgevers. Op deze manier weten we zeker dat de verwachting overeenkomen met wat wij gaan leveren.
Onderwerpen in de blogserie 3D scannen: de basics
- Wat is 3D scannen?
- High-end scanning vs. low end scanning
- De meerwaarde van werken met pointclouds
- Wat je moet weten over nauwkeurigheid en resolutie
- 3D scanner kopen en zelf starten met 3D scanning
- Bonus: checklist – De juiste pointcloud aanvragen
PelserHartman 3D Measuring Solutions
We zijn dagelijks bezig met innovaties en leren mensen 3D meten en modelleren. Partners van PelserHartman krijgen onze kennis en maken bovendien gebruik van al onze apparatuur en software.
We geven antwoorden op vragen zoals:
- Hoe start ik met 3D scannen en modelleren?
- Hoe maak ik visualisaties, ortho foto’s en 3D viewers?
- Hoe teken ik zo weinig mogelijk?
- Hoe beperk ik de faalkosten?
Meten met bouwkundigen
Weten wat je meet is net zo belangrijk als weten hoe je meet.
Wij vinden dat je alleen goed meet wanneer je de business begrijpt. De bouw kent naar verhouding de meest complexe situaties voor 3D meten en uitzetten. Het is in de praktijk extreem belangrijk te begrijpen wat je precies meet – en met welk doel. PelserHartman meet daarom met een team van bouwkundigen. Hiermee hebben wij een unieke positie in de wereld van 3D scanning.
Wil je starten met 3D scanning, meer informatie over de checklist 3D scannen of heb je een project waarin scanning misschien iets kan betekenen? Neem dan contact met ons op! Bel met 073-6135729 of stuur een email naar info@pelser-hartman.nl