Deze blog maakt deel uit van een serie van twee artikelen waarin we informatie en praktische handvatten geven voor mensen die willen starten met het tekenen en modelleren met pointclouds. Op basis van de informatie in deze blogs bent u in staat om goede voorbereidingen te treffen om probleemloos het maximale resultaat te halen uit 3D metingen met een laser scanner.
Starten met pointclouds
U wilt gaan starten met het werken met pointclouds binnen uw organisatie. Het meten met 3D scanners en het werken met pointclouds biedt veel voordelen. U bereikt echter alleen optimaal resultaat wanneer u zorgt voor een goede voorbereiding. Daarnaast zult u een aantal specifieke zaken moeten weten over 3D laserscandata, software en hardware en het werken met pointclouds. Deze blog is de tweede blog uit de reeks en gaat over 3D laserscandata en transport van scandata.
Heeft u deel 1 nog niet gelezen? Ga dan eerst naar de pagina Starten met pointclouds – Deel 1
‘Zware’ pointcloud uit laserscanner
Een pointcloud is een wolk van meetpunten. Ieder punt heeft een coördinaat: X,Y,Z. Niet alleen een 3D laserscanner produceert een pointcloud. Men kan ook pointclouds creëren met fotocamera’s door middel van fotogrammetrie, wit-lichtscanners, total stations, en infra rood scanners. In de bouw, installatietechniek en food- en petrochemische industrie komen we echter vaak in aanraking met pointclouds uit een laserscanners. Deze pagina beperkt zich tot landmeetkundige datasets uit laserscanners.
Grootte van pointcloud
Een pointcloud van een klein project heeft al snel een omvang van 5 tot 10 gigabyte. Bij de grotere projecten kan dit al snel oplopen tot 50 gigabite en pointclouds van projecten met een hoge scandekking (veel scans per oppervlakte) in combinatie met hoge-resolutie-scans zijn al snel meer dan 400 gigabite groot. Om goed om te kunnen gaan met deze zware data is vanzelfsprekend kennis en goede voorbereiding op zijn plaats.
‘Omzetten’ pointcloud kan niet
Pointclouds uit laserscanners zijn vaak zware data en de punten zijn niet om te zetten naar een DWG-, DXF- of XYZ-file. Ook kunnen de pointclouds meestal niet zomaar even omgezet worden naar een mesh, STL- of STEP-file, of naar een solid model. Pointclouds worden meestal gebruikt als onderlegger, of externe referentie, en “draaien op de achtergrond” in de teken- of modelleersoftware. De pointcloud wordt dus niet echt letterlijk geïmporteerd in het tekenpakket.
Bestellen van de goede pointcloud
Wij krijgen vaak vragen zoals: “Wat kost het inscannen van een gebouw?” en opmerkingen als “De concurrent scant het gebouw voor de helft van de prijs!” Het is niet zo vreemd dat mensen dit soort vragen stellen. 3D laserscanning laat veel aan de verbeelding over. Scanning is een containerbegrip; pointclouds zien er altijd spectaculair uit. Het lijkt alsof alle scans van dezelfde kwaliteit zijn. Dat is echter niet zo.
Het is belangrijk om een goede uitgangsvraag te maken. Met de juiste uitvraag krijgt u passende offertes en uiteindelijk ook de juiste scandata heeft om mee te werken. Gebruik onze Checklist 3D scanning om overzicht te houden over de uitvraag.
Hieronder vindt u de handvatten die helpen bij het bestellen van de juiste pointcloud.
Wat wordt het product?
Het is belangrijk om vooraf te melden wat u wilt gaan doen met de pointcloud. Welk product bent u van plan om te gaan maken? Gaat het om het maken van een 2D-tekening, een 3D model, een vergelijking, een clash detection of controle van tekeningen van andere partijen?
Voor welke tekensoftware?
Het is belangrijk om kenbaar te maken met welke software u werkt. Op deze manier kan de leverancier van de pointcloud de scandata aanpassen op uw softwarepakket. Uiteraard is het van belang dat u zelf ook het nodige weet van de mogelijkheden van uw softwarepakket. Zorg dat u de limieten van de software en hardware kent en denk vooraf na over het opdelen van de pointcloud.

Welk coördinatenstelsel en welke oriëntatie?
De pointcloud kan desgewenst in een specifiek coördinatenstelsel geplaatst worden. Besluit voorafgaand aan de scanning ook in welk coördinatenstelsel de data aangeleverd moet worden (lokaal bekend stelsel, RD-stelsel, of een nieuw aan te brengen stelsel). Besluit ook hoe de pointcloud georiënteerd moet worden zodat u direct probleemloos aan de slag kunt in uw tekenpakket.
Welke kwaliteit en resolutie pointcloud?
De ene scanner maakt veel betere meetdata – of een andere soort meetdata – dan de andere. De verschillen zijn vaak lastig te zien en je ziet niet snel of er gescand is met de goede resolutie, ruisonderdrukking, de juiste dekking, een high-end scanner of met huis-tuin-en-keuken-apparatuur.
Omschrijf de resolutie en de toegestane hoeveelheid ruis van de pointcloud. Denk daarbij goed na en vraag niet te snel ‘voor alle zekerheid’ een zeer hoge kwaliteit data. Dit kan leiden tot veel hogere kosten. Scanprijzen worden immers bepaald door de totale scantijd, en die is weer sterk afhankelijk van het aantal scans (het aantal standplaatsen), de resolutie en de fotokwaliteit. Stem deze factoren – en met name de resolutie – vooraf goed af met het scanbedrijf. Met de resolutie wordt de gemiddelde afstand bedoeld tussen twee meetpunten. Dit bepaalt het detailniveau van de scan en de hoeveelheid informatie in de scan. Resolutie heeft niets te maken met nauwkeurigheid, maar met de mate van detail.
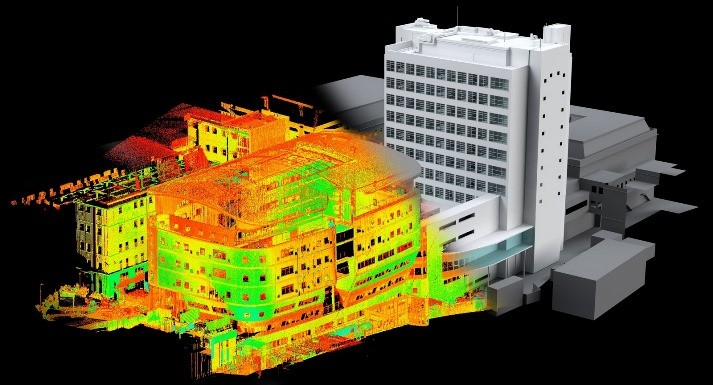
De afbeelding hieronder laat een hoge kwaliteit, hoge resolutie gekleurde pointcloud zien.
Welke dekkingsgraad?
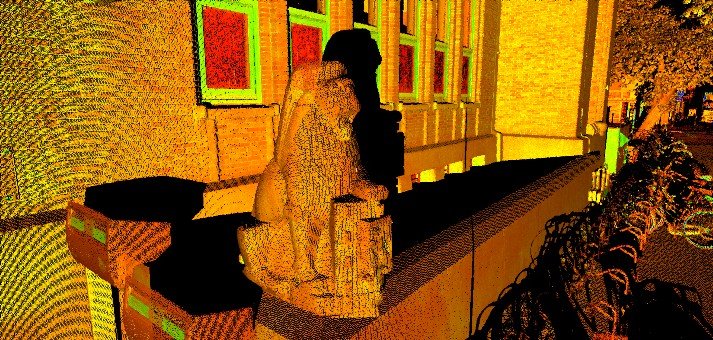
Een laserscanner meet onderdelen die vanaf stabiele standplaatsen op straat- of grondniveau met enige afstand tot het object zichtbaar zijn. Een laserscanner meet nergens doorheen. Een laserscanner kan niet overal geplaatst worden. Soms is de ruimte te klein of de gewenste standplaats niet bereikbaar of niet stabiel. Er zal dus altijd sprake zijn van enkele ‘zwarte gaten’ in de scandata.
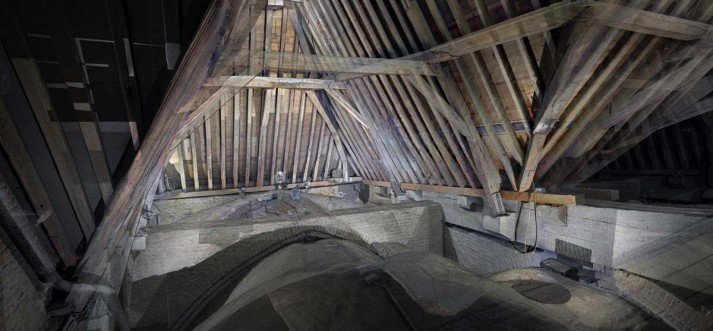
Het verschijnsel ‘zwarte gaten’ is goed te zien in onderstaande afbeelding. Het stenen beeld belemmert ‘het zicht’ van de scanner op een stuk van de achtergelegen muur. De laserstralen meten niet door het beeld heen waardoor delen van de metselwerk muur niet worden ingemeten. Er is sprake van een zwart gat of ‘schaduw’.
Opschonen van de pointcloud
Aanwezige mensen, objecten, bomen, struiken en begroeiing staan op de laserscan en worden niet vanzelfsprekend verwijderd uit de scan. Maak vooraf goede afspraken over het opschonen van de scandata (het verwijderen van ongewenste objecten uit de scan), want het kan erg veel tijd en dus geld besparen als dit niet hoeft te gebeuren.
Maataccuratie (nauwkeurigheid)
Er wordt vaak op basis van specificatie van de apparatuur gezegd dat laserscans een nauwkeurigheid kunnen hebben van 1mm. Het is echter een feit dat geen enkele terrestrial 3d laserscanner een praktische bruikbare maataccuratie kan bereiken binnen 3mm. Over het algemeen kan een nauwkeurigheid van 3-5mm worden aangehouden wanneer men werkt met high-end apparatuur. De meting kan verbeterd worden door deze uit te voeren i.c.m. andere meetsystemen zoals total station. Vraag de leverancier van de pointcloud altijd om een bewijs aan te reiken waaruit de geleverde maataccurate kan worden opgemaakt. Bijvoorbeeld het registratierapport van de pointcloud en/of het vereffingsrapport.
Tip:
Vraag de pointcloudleverancier vooraf hoe ze de gevraagde maataccuratie denken te gaan realiseren.
Laat de maatvoerder tijdens het scannen en inmeten vaste referentiepunten uitzetten. Dit maakt controle achteraf eenvoudiger.
Vraag naar het type laserscanner
Naast de high-end professionele scanners bestaan er ook huis-tuin-en-keukenscanners. Je zou kunnen vragen naar het merk en type laserscanner. Vraag in ieder geval altijd naar de hoek- en afstand nauwkeurigheid van het apparaat en natuurlijk het kalibratierapport (jaarlijkse kalibratie is gewenst).
Overige vragen die wij vaak stellen aan onze klanten:
-Wat wilt u precies kunnen doen met de scans?
-Wat wilt u kunnen zien in de scans?
-Welk detailniveau moeten de scans hebben?
-Wilt u realistisch gekleurde scans? (Scans i.c.m. foto opname)
-Wilt u naast de pointcloud ook een viewer van de scans ontvangen?
Aanleveren van de pointcloud
 Pointclouddata heeft een grote omvang waardoor het niet mogelijk is deze data via de e-mail te versturen. Er zijn twee manieren waarop de data aan u kan worden aangeleverd.
Pointclouddata heeft een grote omvang waardoor het niet mogelijk is deze data via de e-mail te versturen. Er zijn twee manieren waarop de data aan u kan worden aangeleverd.
- In delen van maximaal 20 gigabyte via de website www.wetransfer.com
- Per post op een externe harde schijf
Bij het aanleveren van de data via wetransfer dient u er rekening mee te houden dat het uploaden en downloaden, afhankelijk van de snelheid van de internetverbinding, enkele uren tot een werkdag kan duren. Wanneer de data te groot is (>20Gigabyte) wordt deze op een door de opdrachtgever aangeleverde harde schijf of USB stick met voldoende capaciteit aangeleverd. Overleg met uw contactpersoon bij PelserHartman over de minimale opslagcapaciteit van het opslagmedium dat u dient te leveren.
Aanleveren niet geconverteerde data
U kunt ervoor kiezen de geregistreerde scandata te ontvangen in het ‘native formaat’ zoals door de pointcloudsoftware gemaakt. Hierdoor bespaart u een deel van de kosten voor het verwerken van de scandata. De pointcloud wordt standaard geleverd als een samenstelling van separate pointclouds (telkens één pointcloud per scanpositie) die ten opzichte van elkaar correct gepositioneerd zijn (oftewel; geregistreerd). Een geregistreerde pointcloud bestaat standaard uit een verzameling files. Het betreft bijvoorbeeld een reeks bestanden met als extensie ZFS als de scandata gemaakt is door het programma LaserContol.

Om deze pointcloudbestanden te gebruiken dient u deze zelf te converteren naar een voor uw CAD-pakket geschikt bestandsformaat. Gebruikt u AutoDESK producten dan kunt u door gebruik te maken van AutoDESK RECAP de laserscandata zelf converteren naar een pointcloud geschikt voor AutoCAD, REVIT of een ander AutoDESK product.
Aanleveren geconverteerde data voor AutoDESK producten
Het omzetten, indexeren, samenvoegen of opdelen van pointclouds kost de nodige tijd en kan uw werkstation langere tijd belasten. Wij kunnen deze werkzaamheden voor u uitvoeren. In dat geval wordt de pointcloud aangeleverd als een RCP bestand. Deze bestanden zijn rechtstreeks te gebruiken in programma’s van AutoDESK. Onderstaand ziet u de aangeleverde mappenstructuur van de pointcloud zoals u deze van ons ontvangt. In onderstaand voorbeeld zijn er twee losse pointclouds aangeleverd. Het bestand 4062_tot.rcp betreft in dit geval een verzameling van alle laserscandata. Daarnaast is er een bestand 4062_dak_rcp. Hier hebben we op verzoek van de opdrachtgever ook een separate pointcloud van het dak gemaakt.

Aanleveren geconverteerde data voor andere CAD-paketten
Werkt u in een ander CAD pakket, controleer dan eerst of dit pakket geschikt is om te werken met pointclouds. Daarnaast is het belangrijk uit te zoeken welk bestandsformaat de pointcloud zal moet hebben om te kunnen worden ingeladen. Vervolgens kunt u met ons contact opnemen over de wijze van aanleveren. U vindt meer informatie over soorten pointclouds op de pagina: point cloud uit laserscanner.
Meer informatie over starten met 3D laserscanning
Weet u nog niet precies wat 3D laserscanning is? Download onze whitepaper 3D scannen voor een compleet overzicht van alle informatie.