PelserHartman is specialist in het 3D inmeten van boten en schepen voor verschillende soorten bedrijven in de botenbouw. We meten zeer nauwkeurig volledige rompen van 100 meter+, maar beschikken ook over de juiste 3D laserscanners en andere apparatuur om razendsnel alle ruimten in kaart te brengen voor interieurbouw of voor het inbouwen van nieuwe installaties in schepen. We leveren alle soorten 3D modellen, meshes, deformatieanalyses en inhoudsberekeningen.
3D inmeten boten, jachten & schepen
PelserHartman meet verschillende soorten vaartuigen met high-end pulse-, phase-, lijn- en structured-light-scanners. We leveren 3D meetpunten, pointclouds, en de meest uiteenlopende 2D tekeningen en en 3D modellen. Daarnaast maken we simulaties, vergelijkingen en clash-detections om fouten op te sporen of om deze juist te voorkomen.
Diensten PelserHartman voor scheepsbouw
Natuurlijk ben je bij ons aan het juiste adres wanneer er 3D scans gemaakt moeten worden in een jacht voor interieurbouw. We meten altijd met de beste high-end apparatuur en kunnen alle soorten datasets, mesh-files en 3D modellen leveren. Hieronder zie je een opsomming van alle andere diensten die wij uitvoeren en de producten die wij maken in de scheeps- en jachtbouw:
- Rompcontrole (on-vlakheden en vormverschillen)
- Modelleren van dubbelgekromde vlakken in 3D
- Inhoudsmetingen en berekeningen (bijvoorbeeld de netto inhoud van grote dieseltanks)
- Glasmetingen (hoge nauwkeurigheid en hoge resolutie noodzakelijk vanwege dunne randen)
- 3D inmetingen van huid-doorvoeren en kleppen.
- Vlakken van scheepsdekken. Bijvoorbeeld voor de productie van teakhouten dekken.
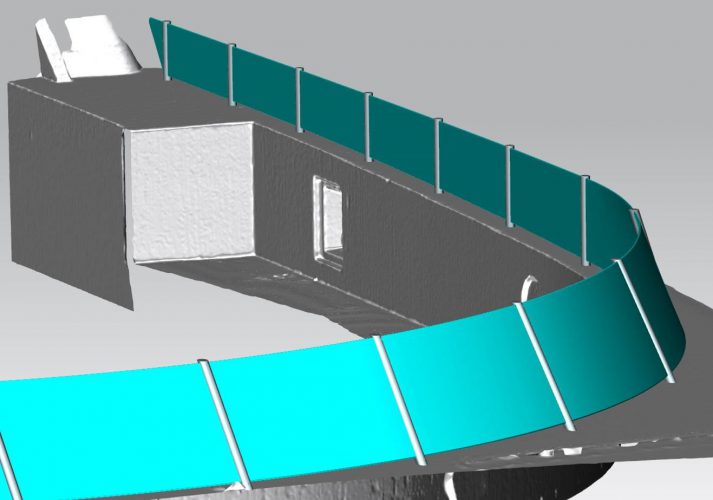
- 3D metingen en mesh-modellen voor productie van relingen, zonweringen, windbrekers.
- 3D scanning van engine rooms en installaties. Bijvoorbeeld voor prefabricage van nieuwe uitlaatsystemen.
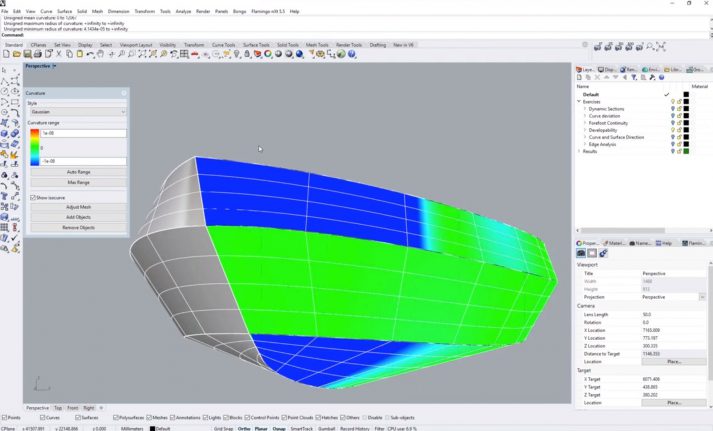
Globale vormanalyse van de buitenzijde van een romp in Rhino
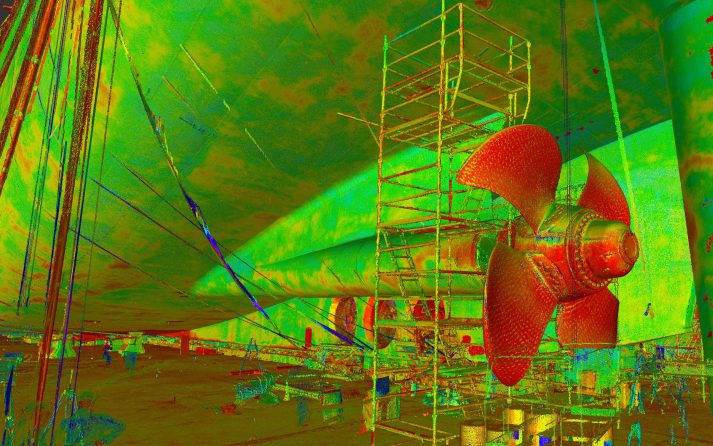
3D scanning op een scheepswerf
De meetmethoden voor het 3D inmeten van boten wordt grotendeels bepaald door de situatie ter plaatse. Wanneer een schip of jacht op de scheepswerf ligt, zijn er vaak veel partijen tegelijkertijd aan het werk. De ruimtes zijn klein en alles staat in de steigers. Het is er dan meestal erg rommelig. PelserHartman meet vaak op scheepswerven en weet wat de aandachtspunten zijn. We combineren verschillende metingen en deelprojecten en voeren het werk zodanig uit dat de meettijd op de werf zo kort mogelijk wordt. Door 3D laserscanning is de inmeting compleet en betrouwbaar. Veel zaken kunnen tegelijkertijd worden ingemeten en het komt niet voor dat we iets vergeten te meten.
3D inmeten boten en controle buitenzijde romp
De complexe vorm van de romp van een schip maakt een tweedimensionale benadering lastig. Met behulp van 3D laserscanning worden complexe dubbel gekromde vormen gedigitaliseerd. Iets dat met traditionele meetinstrumenten zo goed als onmogelijk of te tijdrovend is.

Met een 3D scan heb je een 3-dimensionale weergave in de vorm van een puntenwolk, ofwel pointcloud voor handen. De pointcloud is de ideale basis voor controles of als onderlegger voor modelleren en engineering. PelserHartman controleert de lengte van scheepsrompen middels laserscanning. Een deformatie- of een vergelijkingsanalyse van het 3D ontwerp met de werkelijke situatie behoort tot de mogelijkheden. Meer informatie over deformatie-analyses staat op onze pagina 3D deformatiemetingen.
Eindproduct pointcloud of mesh
Het is goed te weten welk eindproduct je nodig hebt. Een pointcloud ofwel puntenwolk is een wolk van miljoenen geometrische meetpunten. Een mesh is een triangulatie product (driehoeksvlakken). PelserHartman levert diverse bestandsformaten. Voor pointclouds leveren wij onder andere het *.RCP, *.E57, *.PTS bestandsformaat. Voor meshes onder andere. *.STL, *.OBJ, *.DXF, *.PLY. Op onze downloadpagina hebben we diverse pointcloud bestandsformaten geplaatst. Hiermee kun je zelf testen welke formaat het meest geschikt is voor jouw softwareprogramma. Staat het formaat dat je zoekt er niet bij, neem dan contact op met PelserHartman.
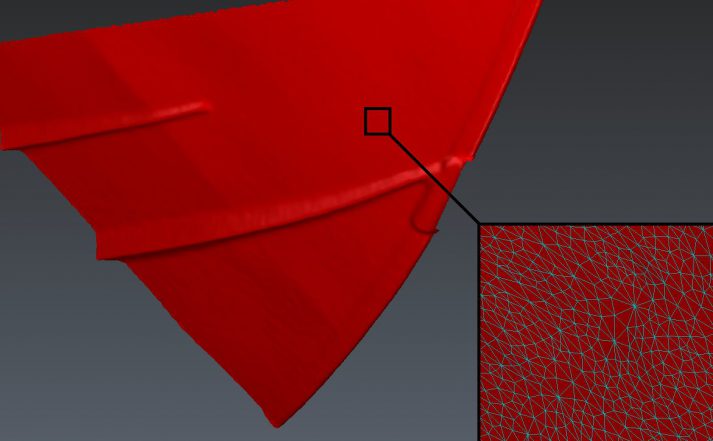
Mesh van de boeg van een schip. Ingezoomd de driehoeksvlakken waaruit de mesh opgebouwd is.
Pointclouds en meshes in Siemens NX
Diverse klanten van PelserHartman werken met de professionele software Siemens NX. Zij ontwerpen en maken onder andere relingen, windschermen, zonneschermen en trappen voor luxe boten en jachten.
De ondergrond of achterconstructie waarop deze onderdelen worden gemonteerd wordt altijd vooraf precies ingemeten op locatie. Met behulp van laserscanning wordt de bestaande situatie exact digitaal in kaart gebracht. PelserHartman heeft een methode om te werken met 3D laserscanningdata in de Siemens software. Pointclouddata uit de 3D laserscanner wordt met deze methode omgezet naar vlakken.
Van pointcloud naar mesh voor engineering in Siemens NX.
Pointclouds in Rhinoceros / Rhino 3D
Rhino 3D is een veel gebruikt programma voor het ontwerp van jachten en schepen. PelserHartman levert pointclouds geschikt voor deze modelleer software of specifieke plug-ins welke voor Rhino 3D beschikbaar zijn. We zetten laserscaninformatie om in vlakken informatie geschikt voor Rhino 3D.
Rhino 3D modelleerprogramma voor jachten en schepen (Bron: YouTube Rhino)
3D inmeten boten en jachten met laserscanners voor interieurbouw
Laserscanning is uitermate geschikt voor toepassingen in de jachtbouw en dan met name voor de inbouw van het interieur. Bij interieurbouw zijn de werkelijke inbouwmaten van groot belang. Alle werkelijke vormen worden met razendsnel en zeer gedetailleerd vastgelegd in de pointcloud. Hierdoor mis je geen enkele maat en maatfouten zijn uitgesloten. Een inmeting met laserscanners is tegenwoordig snel gemaakt, doordat het tijdrovende ‘inscannen van referentiepunten’ (targets) achterwege kan blijven. Het werk hoeft niet meer stilgelegd te worden en we lopen zelden iemand in de weg.
Opmerking van een interieurbouwer van Heesen Yachts tijdens het laserscannen:
“Ik zou een dag bezig zijn met wat je nu in uurtje doet”.
Zelf scannen of laten scannen?
PelserHartman verhuurt ook 3D laserscanners zodat je zelf op locatie in binnen- of buitenland kunt scannen. Iedere laserscanner heeft zijn eigen werkgebied. De nieuwe BLK 360 scanner van Leica is bijvoorbeeld supercompact en licht. De pointcloud data uit deze laserscanner is daarentegen minder geschikt voor triangulatie toepassingen waarmee bijvoorbeeld Siemens NX werkt. Op onze BLK360 pagina vergelijken we een mesh gemaakt uit Leica P40 pointclouddata met die van uit de BLK360. Ons grondbeginsel is: goede laserscanners leveren goede pointclouddata. PelserHartman adviseert graag bij het kiezen van de juiste laserscanner of meetmethode bij de juiste klus. Heb je liever dat wij voor jou scannen? Geen probleem, we hebben ruime ervaring met het scannen van vaartuigen.
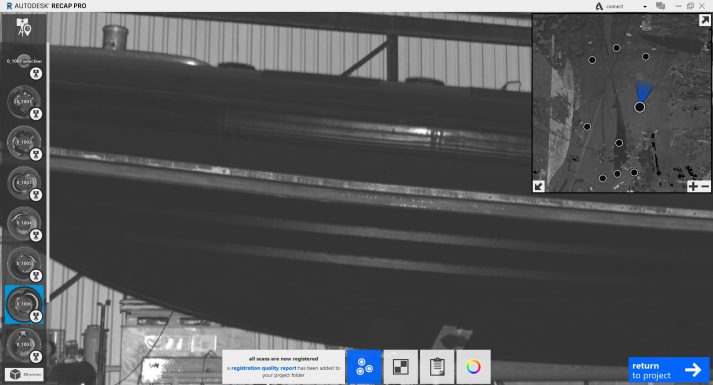
Registratie van pointclouds in Recap Pro
Zelf registreren in ReCap Pro?
We zien steeds vaker dat bedrijven pointclouddata zelf registreren met Autodesk ReCap Pro. Dit gaat regelmatig goed, maar de praktijk laat zien dat dit niet altijd het geval is. Het is belangrijk vooraf de mogelijke valkuilen te bespreken van zelf registreren. Het soms niet herkennen van targets in ReCap Pro is bijvoorbeeld een bekend aandachtspunt. PelserHartman werkt met verschillende professionele pointcloud verwerkings programma´s om pointclouds te registreren. En heeft uitgebreide kennis van diverse registratiemethodes waaronder cloud-to-cloud-, plane-to-plane- en targetregistratie.
Meer weten of een aanvraag plaatsen voor uitvoering van een 3D inmeting?
Neem dan contact met ons op!