PelserHartman geeft korte introductiecursus Pointcloud in Revit voor architecten en tekenaars.
Doel van de introductiecursus Revit
Na de korte introductiecursus Werken met pointcloud in Revit kan de cursist een pointcloud op de juiste wijze plaatsen in Revit en deze op een goede manier interpreteren en hiermee modelleren. De cursist weet hoe hij de aanvraag moet formuleren aan een pointcloudleverancier (het meetbureau) wanneer hij een pointcloud wil ontvangen.
De cursist weet na afloop genoeg van laserscanning om het meetbureau te kunnen beoordelen en te controleren. Daarbij weet de cursist wat de besparingsmogelijkheden zijn.
Onderwerpen van de cursus:
- Bepaling kwaliteit 3D laserscanning (wat vraagt u aan het meetbureau)
- Eerste verwerking laserscandata (de pointcloudregistratie)
- Tweede verwerking pointcloud (geschikt maken voor tekenwerk)
- Tekenen met een pointcloud in Revit
(Lees ook alvast de blogpost: Pointcloud in Revit)
Pointclouddata in Autodesk Revit
1. Bepaling kwaliteit 3D laserscanning
We laten zien welke zaken tijdens het uitvoeren van het meetwerk invloed hebben op de kwaliteit van de pointcloud. Hierdoor kun je vervolgens het meetbureau de juiste instructies geven zodat je ook echt krijgt wat je nodig hebt. Onderwerpen die hierbij een rol spelen zijn onder andere:
- Wat wil je wel en niet zien in de pointcloud?
- Wat is belangrijk bij kozijnopeningen en kozijnafmetingen?
- Hoe om te gaan met belemmeringen en onzichtbare zaken?
- Waar gaat het om massa en hoofdmaatvoering en waar gaat het om detail?
- Verschil tussen nauwkeurigheid, volledigheid en gedetailleerdheid.
- Wat is het verschil tussen een phase- en een pulse scanner?
- Wanneer wil je een gekleurde pointcloud en een truviewer?
- Wanneer wil je orthofoto’s?
2. Eerste verwerking laserscandata (de pointcloudregistratie)
Registratie van een pointcloud
We leggen in hoofdlijnen uit hoe de registratie van een pointcloud verloopt. Tijdens de registratie worden reeds een aantal belangrijke keuzen gemaakt. We kiezen hier het juiste coördinatenstelsel en integreren eventueel andere meetdata zoals die van een total station of tachymeter.
Lees meer over het registreren van pointclouds.
Best fit
Soms is er reeds een 2D of 3D model gemaakt dat gecontroleerd of aangevuld moet worden met laserscandata. In dat geval zijn er een aantal speciale handelingen nodig om de pointcloud goed te kunnen plaatsen. Dit doen we middels de best-fit methode.
3. Tweede verwerking pointcloud
Opschonen pointcloud
Een laserscanner meet alle zaken die zichtbaar waren vanaf de plek waar hij stond (gebouw, straten, bomen, vogels, mensen fietsen, auto’s etc). Het is niet altijd wenselijk om alle informatie in het tekenpakket te zien. We kunnen de pointcloud in meer of mindere mate opschonen waarbij een groot deel van de irrelevante zaken verwijderd worden.
Pointcloud verkleining en exporteren
Tijdens deze stap wordt de pointcloud geschikt gemaakt voor het betreffende tekenpakket. Autodesk Recap is een van de programma’s die de grootte van de pointcloud kan verkleinen als de pointcloud te groot is om mee te werken. Hierbij dient goed bekeken te worden of de overgebleven data nog bruikbaar is, aangezien hier dan wel een en ander aan detail verloren kan gaan.
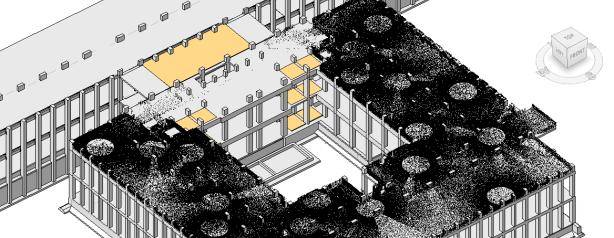
4. Tekenen met een pointcloud in Revit
Inladen en plaatsing van pointcloud in Revit
Wil je direct zelf testen met 3D pointcloud data? Op onze download-pagina vind je voorbeelden van scandata voor Revit. Dit is redelijk eenvoudig, maar enkele slimme tips kunnen het proces versnellen en de workflow verbeteren.
Tekenen met de pointcloud
We laten zien hoe men om moet gaan met een pointcloud, hoe deze geïnterpreteerd moet worden en hoe je keuzes maakt.
Meer informatie en interesse?
Interesse in deze korte introductiecursus? De cursus is vaak gratis wanneer je samen met ons een project doet. Informeer naar de mogelijkheden. Bel direct met PelserHartman op nummer +31 73 613 57 29 of kijk hier voor andere contactopties.