Deze pagina geeft informatie over verschillende pointcloudfiles. We vertellen welke verschillende formaten er zijn en welke keuzes je moet maken wanneer je wil werken met een point cloud in AutoCAD en Recap.
Zelf tekenen of modelleren met een pointcloud of zelf een pointcloud maken? Kijk dan op de pagina Trainingen. Of bel ons op nummer +31 73 613 57 29.
Wat is een pointcloud?
Gebouwen, installaties en andere objecten worden door PelserHartman vaak ingemeten met behulp van 3D laserscanners. Het resultaat van deze inmeting is een wolk van meetpunten oftewel een pointcloud. De pointcloud bestaat uit miljarden meetpunten. Onderdelen die tijdens het scannen zichtbaar zijn vanaf de verschillende standplaatsen van de laserscanner worden ingemeten. De pointcloud gebruiken we als onderlegger in AutoCAD en Revit voor het maken van tekeningen en 3D modellen. In de ReCap pointcloud viewer kun je puntenwolken bekijken.

Pointcloud van een 3D meting van het Fratershuis te Tilburg
Welke soort pointcloud heb ik nodig?
In de wereld van pointclouds bestaan er veel pointcloudformaten. Voor de Autodesk programma’s is er één pointcloud formaat beschikbaar waarmee alle programma’s werken. Deze kan gebruikt worden in de modelleerprogramma’s AutoCAD en Revit en in de pointcloudviewer ReCap. Dit is het RCP/RCS formaat.
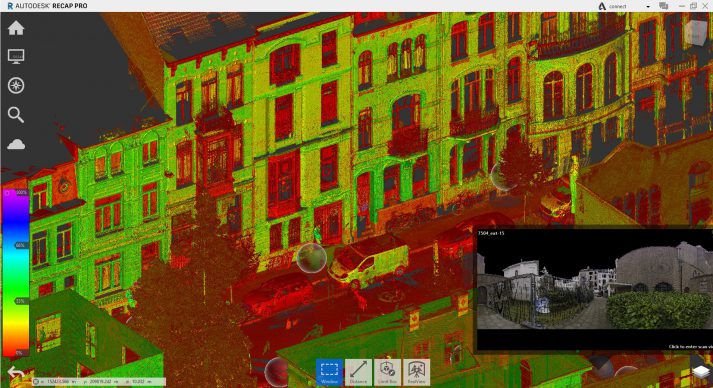
Screenshot van ReCap pointcloud viewer
Point cloud in AutoCAD, ReCap of Revit
De populairste modelleerprogramma’s waarmee met pointclouds gewerkt wordt, zijn AutoCAD en Revit. Beide behoren tot de Autodesk familie. Voor het modelleren in Revit of AutoCAD heb je pointclouds in ReCap formaat nodig. De ReCap bestandsformaten *.rcp en *.rcs zijn eenvoudig te importeren/koppelen.
Onderstaande film laat zien wat 3D scanning is en hoe je gebouwen modelleert op basis van een pointcloud in Revit en AutoCAD. In de film komen ook 3D viewers, orthofoto’s en meshes aan bod.
Pointclouds voor AutoCAD
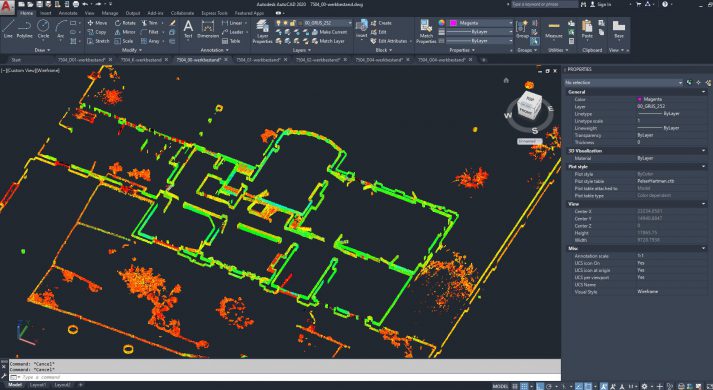
AutoCAD wordt nog steeds veel gebruikt om bouwtekeningen te maken. Dit programma biedt de mogelijkheid om op eenvoudige wijzes snedes te maken in pointclouds. Zo kan je razendsnel “op” de pointcloud tekenen.
Functionaliteiten zoals het onthouden van de pointcloudsnede maken het tekenen met AutoCAD gemakkelijk en snel. Het programma biedt de mogelijkheid om de punten weer te geven in andere kleuren zodat het tekenen nog eenvoudiger wordt. Andere opties zijn het verkleinen of vergroten van de punten of het laten zien van meer of minder punten. Iemand die goed kan tekenen met AutoCAD zal het modelleren met een pointcloud snel onder de knie te krijgen.
Zelf downloaden AutoCAD pointcloud
Op onze downloadpagina zijn diverse AutoCAD pointclouds te downloaden. Hiermee kun je zelf aan de slag gaan met pointclouds.